周建波
上海市特种设备监督检验技术研究院 上海 200062
摘 要:防碰装置是起重机械重要的安全防护装置,其性能质量直接关系到人员和设备安全。常规的防碰装置性能试验方法难以保证试验数据的精度和可靠性。针对防碰装置的工作特点和试验要求,从试验原理、系统结构、运行逻辑等方面入手,设计一套能模拟防碰装置实际运行工况,自动进行性能试验和数据采集处理,精度高、重复性好的试验系统,可以有效提升防碰装置检测能力。
关键词:自动化装置与设备;起重机械;防碰装置;试验系统
中图分类号:TP23 文献标识码:A 文章编号:1001-0785(2020)03-0074-04
1 起重机械防碰装置
1.1 工作原理
随着起重机械大型化、高速化的发展,现场作业环境日趋复杂。由于生产的需要,经常出现同轨道设置多台起重机械(起重小车)或同跨设置多层起重机械的情况,司机仅凭目视难以判断安全距离,容易发生碰撞事故。
防碰装置是起重机械安全防护装置的一种,其主要功能是防止作业时存在干涉风险的起重机械(起重小车)之间发生碰撞。该装置一般采用传感器测距来判断防碰主体与客体间的相对位置,所测距离与设定值比对判定后采取相应控制动作来避免碰撞。按探测媒介分,防碰装置可分为光线式、微波式、超声波式等;按功能形式可分为警报型、减速型、停止型和综合型等;按结构形式可分为直射型和反射型等。
防碰装置的工作原理:当起重机械运行到设定的危险距离时,防碰装置发出声光警报信号或控制信号,使起重机械减速或断电停车,避免碰撞事故的发生。
1.2 性能指标和试验方法
原劳动部安全技术规范LD64 - 1994《起重机械防碰装置安全技术规范》对防碰装置的试验方法作出了详细的规定,防碰装置主要性能指标的试验是其核心部分。防碰装置的主要性能指标是指最大检测距离和设定距离。最大检测距离试验一般在实验室进行,设定距离试验在现场安装调试完成后进行。其中最大检测距离的试验方法为:按规定布置发射部分、接收部分(反射板),发射与接收部分(反射板)之间的距离应大于标定的最大检测距离,逐渐减小试验距离使装置动作,沿检测波法线方向实测发射部分与接收部分(反射板)之间距离。
常规的试验方法一般在平整地面进行,采用地面定位接收部分(反射板)和人工移动发射部分的方法进行。由于场地试验条件的限制和人为因素的影响,试验数据的精度和可靠性都难以保证。本文旨在设计一套能模拟防碰装置实际运行工况,自动进行性能试验和数据采集处理,精度高、重复性好的试验系统,以提升防碰装置检测能力。
2 结构设计
综合考虑试验要求与经济性、可靠性等因素,采用以轨行小车结构为基础,结合传感器技术和自动控制技术的设计方案。
轨行小车结构能较好地模拟防碰装置的实际运行工况;高精度传感器可以保障试验系统的测试精度;自动控制技术能降低人为不利因素的影响,同时也可减轻劳动强度,提升工作效率。
2.1 系统构成
如图1 所示,防碰装置试验系统主要由轨行小车总成、触摸屏一体机和电气控制柜等部件组成。
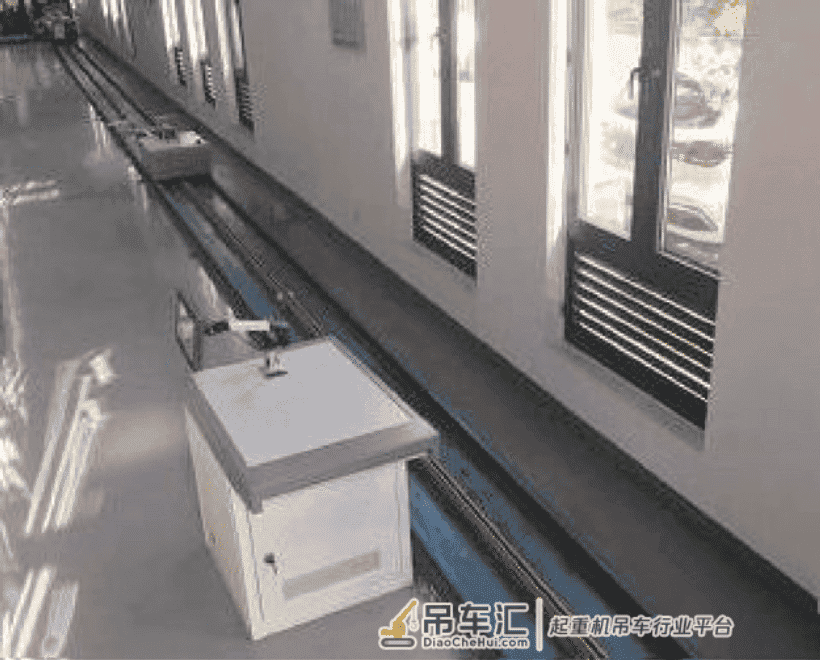
图1 防碰装置试验系统
图2 为试验系统的构成框图。触摸屏一体机是系统的人机交互单元,用来进行参数输入和指令输出;电气控制柜是系统的控制单元,其作用是对触摸屏一体机发出的指令进行处理;轨行小车总成是系统的执行单元,主要功能是执行系统策略。
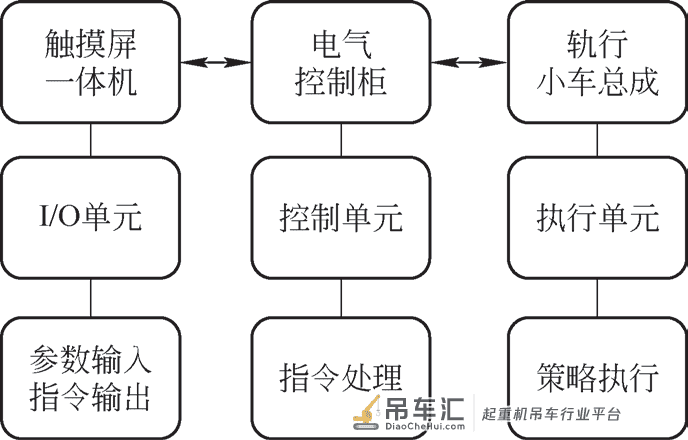
图2 系统构成框图
2.2 轨行小车总成
如图3 所示,轨行小车总成由试验小车、轨道与附件、光干扰试验装置组成,是试验系统的核心部分。轨行小车总成全长30 m,能满足大部分现有产品的试验需求。若被试样品的最大检测距离超出试验系统测试能力,可通过沿轨道纵向中心线向后移动反射板的方法,来增加最大测试距离。反射板为可拆卸式,可固定在轨道端部止挡或配套的活动支架上。
1. 试验小车 2. 端部止挡 3. 聚氨酯缓冲器 4. 轨道5. 光干扰试验装置 6. 滑触线 7. 反射板
图3 轨行小车总成
1)试验小车
试验小车采用伺服驱动,可以按控制指令在轨道上有序运行。如图4 所示,试验小车外壳上装设有无线通讯模块、示警灯、固定夹具。无线通讯模块用于实现试验小车和触摸屏一体机之间的无线通讯;示警灯在试验小车通电时亮起,起到警示作用;固定夹具用于装夹被试的防碰装置。
小车底盘上装设有伺服电机、轮轴系统、开关电源、PLC 功能模块、测距装置和伺服驱动器。轮轴系统是小车运行的执行机构;测距装置用于测试和定位;伺服电机、PLC 功能模块、伺服驱动器与触摸屏一体机、电气控制柜一起组成伺服控制系统,可以精确控制小车运行的位置和速度。

1. 外壳 2. 无线通讯模块 3. 示警灯 4. 固定夹具5. 测距系统 6.PLC 功能模块 7. 开关电源 8. 伺服电机9. 轮轴系统 10. 小车底盘 11. 伺服驱动器
图4 试验小车结构
同时,试验小车上还设置有接近开关、极限限位、防倾覆板和水平反滚轮等安全保护装置。接近开关在试验小车接近行程末端或在行进路线上遇到障碍物时,发出减速停车信号,避免试验小车发生碰撞事故;极限限位采用机械式行程限位,轨道对应位置装有安全尺,在接近开关失效时由机械动作触发停车信号,起到二次保护作用;防倾覆板用于防止试验小车脱轨;水平反滚轮的作用是防止试验小车跑偏。
2)轨道与附件
轨道是试验小车运行的基础,安装时需控制精度以确保试验小车平稳运行。轨道中间位置设有滑触线,为试验小车提供电源;轨道两端设有三色示警灯,用以显示电源通断状态并起到警示作用。轨道两端设有端部止挡,防止试验小车驶出轨道;每个端部止挡上固定有一对聚氨酯缓冲器,可防止试验小车在失控或事故状态下发生碰撞损坏。反射板为测距装置提供测试基准。
3)光干扰试验装置
如图5 所示,光干扰试验装置由杆件、灯座、滚轮和连接板组成,能模拟防碰装置在不同光源干扰条件下的试验状态。
光干扰试验装置为可拆卸式。根据具体的试验要求,其一端可通过连接板固定在防碰装置的信号发射端或接收端(试验小车上或反射板位置),另一端通过滚轮与轨道接触,能跟随试验小车在轨道上一起运行。
灯座布置在横杆上,通过杆件卡槽内布置的电源线供电,可安装不同类型的干扰光源(白炽灯、荧光灯、高压汞灯);灯座可以在横杆的卡槽内滑动和固定以调整干扰光源的入射角度;灯座上设置有可显示电源通断状态的电气开关。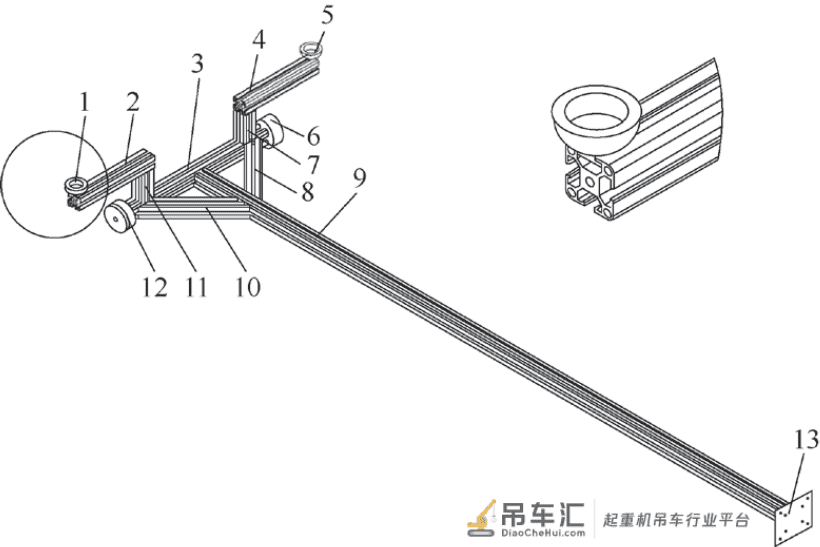
1、5. 灯座 2、3、4. 横杆 6、12. 滚轮 7、11. 竖杆 8、10. 斜撑 9. 纵杆 13. 连接板
图5 光干扰试验装置
3 软件设计
试验系统软件采用MCGS 嵌入版组态软件实现。在组态软件上创建工程,按运行逻辑编制各级操作界面,设定相应的变量和运行策略(见图6),并对各个策略编写脚本程序,软件编制完成后可通过控制系统组件来实现各项试验功能。
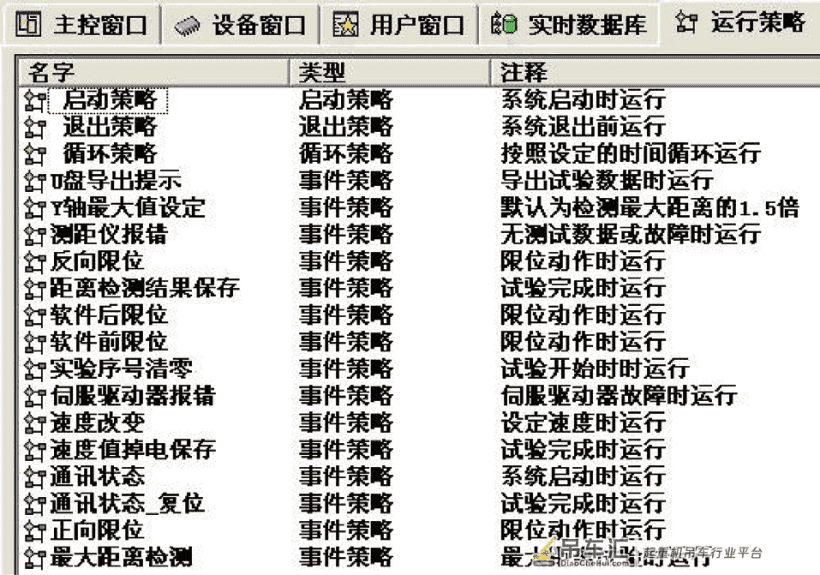
图6 系统运行策略
试验系统除能完成规定的试验功能外,还可通过后台编译运行策略和脚本程序,增加或调整试验项目。如图7 所示,试验系统的运行逻辑是先将被试样品通过固定夹具装夹在试验小车上,接通电源和信号接口。开机后系统自检,判断通讯状态、测距传感器状态、限位开关状态和伺服驱动器状态是否正常。自检合格后自动进入操作界面,选择对应试验项目,根据被试样品标
称的性能指标,输入试验参数后进入试验过程。
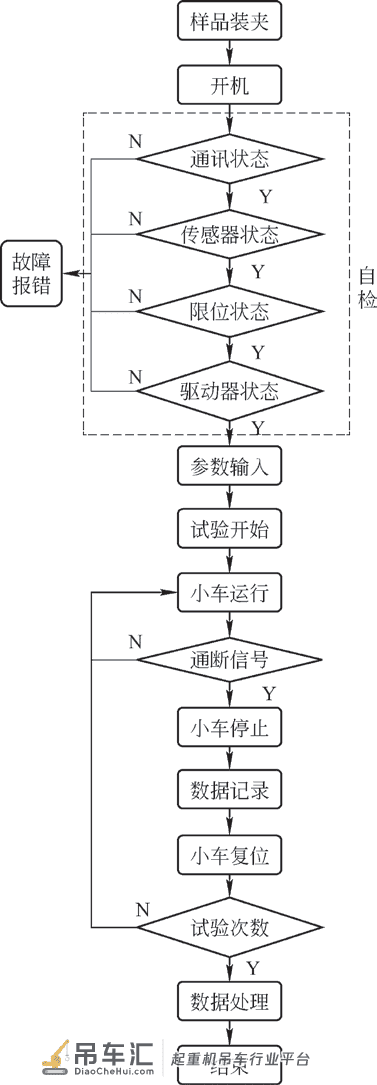
图7 系统运行逻辑图
试验小车运行至相应的位置时,被试样品的控制系统接通继电器开关,发出通断信号和声光警报信号。控制系统在接收到通断信号后,发出指令控制试验小车停止运行并记录测距装置当前测试距离作为1 次试验数据,随后试验小车反向自动运行至试验起始位置,重复以上试验过程直至循环次数满足要求。所测数据经系统自动计算并与输入参数比较分析后,可得出被试样品的性能指标精度,最后在报告界面显示试验结果和结论。
4 结束语
本文针对防碰装置的工作特点和试验要求,从试验原理、系统结构、运行逻辑等方面对防碰装置试验系统的设计过程进行了阐述。结合环境模拟试验设备,该试验系统能为起重机械防碰装置制造厂家提供完善的产品性能检测服务,同时也可开发各种基于轨行小车系统的试验功能。
参考文献
[1] LD64 - 1994 起重机械防碰装置安全技术规范[S].
[2] 孟建军. 起重机的防碰撞装置[J]. 起重运输机械,2002(9):5-7.
[3] 廖立平,吴汉玉,尹明陆. 轨行式设备的红外防碰撞装置[J]. 起重运输机械,1996(7):11-14.
[4] 莫辉. 桥(门)式起重机光线式防碰撞装置的检验 [J].工艺设计改造及检测检修,2017(8):87-89.
[5] 王福绵. 起重机械技术检验[ M ] . 北京:学苑出版社,2000.
来源:起重运输机械
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!