本文选自《起重运输机械》杂志,未经许可,不得转载。
作者:吴昊罡 潘彦宏 步 超
 摘要:对智能起重机的特点与功能进行分析,将其运行的过程分解为多个基本的功能单元,并对各单元的功能需求进行了描述,结合工程实际中面临解决的多种问题,最终提出智能起重机的控制系统的架构形式与关键技术。Abstract: In the paper, the characteristics and functions of intelligent crane are analyzed. Its running process is decomposed into several basic functional units, and functional requirements of each unit are described. In the end, architecture forms of its control system and key technologies are proposed to solve various problems encountered in engineering practice.关键词:智能起重机;控制系统;研究Keywords: intelligent crane; control system; study0 引言
摘要:对智能起重机的特点与功能进行分析,将其运行的过程分解为多个基本的功能单元,并对各单元的功能需求进行了描述,结合工程实际中面临解决的多种问题,最终提出智能起重机的控制系统的架构形式与关键技术。Abstract: In the paper, the characteristics and functions of intelligent crane are analyzed. Its running process is decomposed into several basic functional units, and functional requirements of each unit are described. In the end, architecture forms of its control system and key technologies are proposed to solve various problems encountered in engineering practice.关键词:智能起重机;控制系统;研究Keywords: intelligent crane; control system; study0 引言
随着工厂自动化环境的提升,其中的桥式起重机控制方式亦在由人工控制向自动化、智能控制、远程管理方向发展。为适应新的市场需求,研发适合起重行业智能化发展的技术和产品,通过对国内外智能起重机的智能化技术发展状况和市场需求的调研,结合自动化生产、信息化车间的管理与调度、智能制造加工工艺,对起重机的自动化、信息化、智能化的等关键技术的发展进行研究。借助自动化技术、信息技术、智能控制技术、互联网技术等工具,起重机械的使用、管理可从单一的人工操作、检查向自动化操作、在线监控、远程维护与技术支持转变,进而形成一整套的桥式起重机智能控制平台,提高桥式起重机械产品的性能与竞争力。
1 智能起重机的特点与功能解析
智能起重机可根据工艺设置自动完成起重机移动、搬运等动作,具备可编程、故障诊断、人机界面、自动控制、远程管理等功能,具备感知、规划、执行、协作、学习、数据与信息管理等与人相似的智能功能,其研究范畴应包括智能控制、智能监测、智能管理以及利用大数据进行智能设计等方面,所涉及学科有机械、电气、自动控制与检测、信息与计算机、智能控制、网络通讯等。
起重机最基本搬运工作由操作员根据生产要求,前往取物地点,降下吊钩将物品吊取后提升,到达一定高度后按照一定的路径将物品搬运至下一流程地点,然后卸载。在整个流程中,操作人员要接收不同的生产任务指令,判断取物地点,根据情况选择可执行的指令,执行搬运工作将物品送至指定地点,直至完成整个搬运过程。在工作的过程中,操作人员要使物品在搬运过程中姿态平稳、准确到位,还需注意起重机运行中是否有报警、故障,并根据其等级做出不同的反应。起重机的维护需要根据其设计要求做维护保养,监控系统的人机界面为使用者提供直观的信息描述,其程序软件具备一定调整、升级的能力,为用户提供远程培训与在线指导, 提高服务的实时性与工作效率。
智能化的起重搬运设备要独立完成以下工作,要从控制中心获得任务信息(通讯技术),移动至相应区域取物并搬运至指定位置(吊钩防摇技术、吊钩三维定位技术、物料识别技术、自动程序控制),实时在线监控设备运行状态并做出响应(安全监控管理技术),数据上传至数据中心以及在线维护(远程监控与服务中心) 等。因此,整套设备应具有自动物料信息扫描、自动选择取料地点和目标地点、路径规划、自动搬运物料、定位装置、吊钩防摇摆功能、自动记录工作量并实现报表查询、显示存储故障报警、与控制中心进行信息交换等功能。配备远程在线功能,根据数据汇总提供故障诊断结果和维护指导意见,且能实现异地在线监控和程序修改,上传的数据可供研发部门作为优化设计的参考。
智能起重机的应用可代替人的体力劳动,代替或部分代替人的脑力劳动,形成人、机、物的交互与深度融合,完成感知、决策、执行的全过程,并对状态进行实时监控与过程记忆,为起重机设计提供数据支持,实现成体系的控制、管理。
2 智能起重机控制系统的架构
智能起重机控制系统总体可分为设备级、工厂级、远程管理级等三级架构,图 1 为智能起重机控制系统的架构示意图。
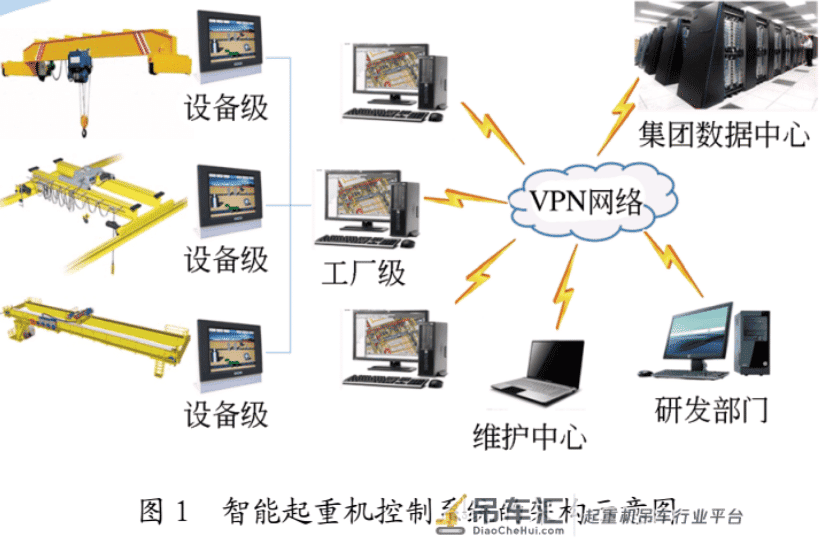
设备级系统即单台智能搬运起重机的控制系统,为单台智能化起重机单机设备的运行监控管理平台,负责管理下属设备的全自动运行,执行控制中心下达的各项指令,并把相关的监控管理数据传送到工厂级平台。设备级平台由单机控制系统、定位与防摇装置、自动化控制与物料信息扫描系统组成。单机控制系统由 PLC、人机界面、变频器和各种检测元器件等构成。PLC 通过与外部进行数据交换,根据程序控制,驱动起重机各机构运行,实现全自动运行与设备监控。人机界面提供现场级的状态信息显示与参数设定功能,显示起重机的供电、故障、载荷、吊钩位置、控制模式、检测元件状态、各机构运行状态等主要信息。自动化控制与物料信息扫描系统通过总线通讯的形式与中控系统实现数据交换单独运行的系统,实现对一台起重机的监控管理。起重机定位与防摇装置根据控制算法将大车、小车、吊钩的位置、速度以及吊钩摆角控制在误差范围内。自动监控与物料信息扫描系统主要作用是根据物料分布情况和工艺要求在车间内进行任务调度,具体负责自动识别物料分布情况,向监控系统和起重机控制系统收发信息,根据工艺要求发布自动运行指令。
工厂级系统将厂区内各设备级系统与工厂级服务器组成网络,由工厂级服务器实时监控、收集所有设备运行状态,可记录、打印、传输相关运行记录,根据生产要求对运行设备进行自动运行生产调度,提供日常维护与技术指导。工厂级平台一般位于整个厂区的主控室内, 由一台性能稳定、具备高速处理能力的计算机作为其主要设备,还附带各类通讯设备,如光纤、总线、无线网络等通讯形式。在计算机内部署监控软件、数据库软件、自动化生产管理软件,整套软件负责信号采集、故障自检、数据存储与管理、自动运行控制、信息传输等为实现安全运行及远程监控的各项功能。设备级平台与工厂级平台之间通过厂级局域网进行互联互通,所有的采集信息经由工厂级平台实时读取并汇总管理。在工厂级的控制平台上可远程控制起重机的起动、停止,选择自动控制模式,执行的任务种类,各类任务按优先级高低依次执行,同优先级任务按时间先后依次执行。
远程管理系统通过 VPN 网络对各工厂设备群进行远程集中监控管理,可实时掌握各工厂级所属设备的运行状态,对所有设备运行数据进行保存,并在管理中心形成设备数据中心,根据设备使用情况评估主要部件的生命周期内,向用户提供使用维护建议,并利用大数据分析系统协助优化起重机设计。
3 关键技术
3.1 安全监控及远程服务技术
智能起重机械对安全、效率、能耗、成本的要求更高,通过应用安全监控及远程服务技术可进行实时故障监控,并能开展远程故障诊断,提高起重机行业的安全保障、服务水平和快速响应能力,提高设备维护和管理能力。起重机械安全监控提供完善的监控,可长期直接或间接的测量起重机械运行参数,同时记录执行指令和起重机载重情况,根据这些长期的、实际投入使用的设备的详细参数,起重机的设计者、研究人员可获取同批次类似型号起重机大量完整可靠的数据,结合现场工况进行大数据分析,可为优化起重机械设计提供支撑。安全监控及远程服务技术的开发与应用可提高整个起重机体系的管理能力,进而提升起重机械的智能化水平,带动起重机械行业自身的发展。
安全监控与远程服务技术由安全监控系统、VPN 网络系统、数据平台及分析系统等部分组成。数据平台采用面向服务构架的理念,系统应具有可靠性、可扩展性与可管理性的特点,能对起重机械的电气控制系统进行远程连接、数据收集和数据存储。数据平台服务器的架构设计应遵循安全稳定、实用可靠、技术先进、可扩充性、易用性及可维护性的原则,并综合考虑实际情况、特殊要求,形成一套系统的、完整的、全面的、合理的解决方案。安全监控系统实现对起重机械进行状态和故障信息进行数据采集、数据处理和数据上传。数据平台与安全监控系统采用工业级 VPN,建立数据平台与每台起重机的数据连接,并实现了远程维护和升级。
3.2 货物信息识别、校验、反馈技术
智能制造、智能物流中广泛使用了货物识别技术, 该技术包括物品信息数据的编码、采集、标识、管理、传输、读取,对不同形式的货物、包装采用不同类型的信息识别方法是智能起重机实现自动搬运中的关键一环。起重机搬运的物品及类型主要包括:卷(钢卷、纸卷、薄膜卷等)、箱(集装箱、料箱、转运箱等;块— 钢板、钢胚、盾构构件等)、捆(钢管、螺纹钢、轨道、型钢等)、盘(电缆、盘条等)、件(斗、包等)、根(轨道、工字钢、H 型钢、梁等)、散状物料等。
常用的识别方法包括条码、REID 射频标签和图像、图形格式信息识别技术。各种包装形式物品的随身信息存储形式、内容、识别方法等现状和需求,初步确定各类包装形式的信息存储、识别的技术方案。包括条码识别、RFID 射频识别、语音识别、光字符识别、磁识别等特定格式信息识别技术和图像、图形识别、生物特征识别等图像、图形格式信息识别技术。
3.3 吊具防摇技术
自动化生产中对桥式起重机吊钩的位置精确控制要求较高,但起重机运行过程中受到平移机构加减速等因素影响,吊钩可能产生较大幅度摆动,这种摆动使对负载的装卸难以定位,且存在生产安全隐患。因此,针对桥式起重机防摇摆的研究,对提高生产效率,提升起重机运行的自动化、智能化水平有着深远的意义。
国外桥式起重机的防摇在工程应用上主要以带摆角反馈装置的变频防摇技术,以摆角控制算法为核心的变频调速防摇技术,以及依靠速度控制算法的变频防摇技术三种为主,依托专用变频防摇卡实现调速防摇功能。为了满足起重机防摇的需求,国际知名起重设备供应商已经开发出具备防摇功能的变频驱动桥式起重机,部分变频器供应商也开发出基于自有品牌的专用防摇卡件,这些产品的应用极大提高了桥式起重机在运行方面的自动化程度。
目前,国内业界同仁在桥式起重机防摇算法方面进行了大量工作,但相关国产设备在这一应用领域上还存在较大上升空间,亟待使用便捷、通用性良好的变频防摇装置,进一步提升国产设备的自动化程度。
3.4 自动控制、管理软件开发
针对散料、箱、捆、卷等不同物品的堆放形式和存储要求,开发与工况要求相适宜的监控和管理系统MES,包括接口子系统、货位库存管理子系统、物品识别子系统、调度与起重机运行子系统、空间定位子系统等。
起重机的全自动控制系统可从控制室控制起重机的起动、停止,选择自动控制的模式,执行的任务种类。全自动控制工艺设计包括了停车、以及多种优先级的搬运任务。任务按优先级高低依次执行,同优先级任务按时间先后依次执行。例如针对散料堆场的工况,系统需要进行矩阵式分块,找出堆场的取料点和堆放点,选择堆取点需要获取料位的采样数据,以采样点的高程、平面位置以及相互间距离作为挑选依据。在选择全自动工作模式后,全自动控制系统根据优先级执行分配的生产任务。在起重机未执行生产任务时,控制软件按各任务的优先级高低顺序查询该任务是否需要执行,同优先级任务按时间先入先出。当所需物料能够用于生产时,生成相应的取物搬运地址,并启动该任务;若无可用物料时,自动跳过当前任务,转入下一个等待执行的任务进行查询。全自动控制系统为全自动运行调度中心,由高性能计算机和其他附加设备构成,协调分配起重机进行泊车、搬运等任务。厂内 DCS 系统负责提供任务信号, 确定起重机运行方式。
信息管理软件负责货物库存采集、生产数据存储与管理、起重机任务调度、故障自检、信息传输等为实现自动化库存管理与自动运行的各项数据支持功能。设备与控制系统之间通过厂级局域网进行互联互通,所有采集信息经由信息管理软件实时读取并汇总管理。
3.5 三维空间定位技术
起重机三维定位技术涉及被吊物品的外形监测、空位探测、实际存放位置的一维、二维、三维认址、定位方法,以及起重机取物装置(吊钩、货叉、吸盘、抓具、抓斗等)一维、二维、三维认址、定位方法。因此,起重机停车定位即取物装置的认址、定位方法和被吊物品存放的定位方法针对不同物品、不同取物装置、不同定位精度要求,应进行相应的传感器与技术方案研究。
目前定位常用的传感器有:限位开关、接近开关、编码器、条码定位器和齿轮齿条定位等。
1) 限位开关 这里的限位开关指常用的机械接触式限位开关,如直柄式限位开关、十字限位开关、凸轮式限位开关等等,这类限位开关的定位精度较低,在复位时还带有回程,通常应用于定位要求不高的场合。
2) 接近开关 不依靠机械接触的方式使开关发出信号,常见的有电容式、电感式、光电式、霍尔式等, 可应用于定位精度不高的场合,在复杂电磁环境中可能会受到干扰。
3) 编码器 通过安装在运行机构轮轴上获得其速度、位置信息,可与变频器连接作为速度、位置反馈元件,但安装于车轮轴上时会因发生打滑而发生定位偏差, 可通过使用定点校准的方式消除偏差。
4) 条码定位器 通过扫描运行路线上的一维条形码获得准确的位置信息,定位精度可达 ±1 mm,可支持多种类型的传输、通讯方式。
5) 齿轮齿条定位 设置一根齿条于轨道梁上,起重机上装有一个与齿条相啮合的带有编码器的齿轮,随
着齿轮转动编码器发出定位信息,用于平移机构定位, 但应考虑避免因震动等因素导致齿轮与齿条脱节。
3.6 智能化吊具的研制
针对散料、箱、捆、卷等不同物品,需要研究各类取物装置的生产状况、应用情况,研发适合智能起重机应用的自动取物装置,确定各类物品的自动取物技术方案。包括吊钩、C 形钩、电磁吸盘、真空吸盘、货叉、夹钳、夹具、挂梁、箱式吊具、罐、抓斗、抓具等。
针对不同的吊具还可以开发相应的智能管理系统, 在线监测抓具的电气、液压、温度、负载、油位、位置、姿态等多种运行状态信息,通过无线传输、总线通讯等方式进行现场在线监控,并可就地保存至数据库。当具备远程连接的条件时,可以通过互联网传送至生产商的服务中心,提供进一步的服务支持。
4 结论
智能起重机作为智能化工程机械中的一种,目前尚处于探索阶段,但对智能起重机系统进行研究与探索仍具有重要的理论价值和实际意义。本文通过对智能起重机特点和功能的分析,给出了一种智能起重机控制系统的架构形式以及需要研究突破的关键技术,为进一步开发智能控制系统进行了必要的探索。在今后还需结合实际工程应用,考虑各类因素的影响,进行更深入的研究。
参考文献
[1] 岳文翀,常中龙 . 一种用于起重机械安全监控管理系统的设计和实现 [C]. 首届物流工程国际会议论文集(一), 2013: 83-86.
[2] 梁春燕,谢剑英 . 桥式起重机抓斗防摆控制方法研究 [J].测控技术,2000,19(6):24-26.
[3] 施耐德东芝换流器欧洲公司 . 调节悬挂载荷移动的装置及方法:中国,CN 101868418 B[P].2013-07-24.
[4] ABB(中国)有限公司 . 一种具有防摇功能的桥式起重机控制装置:中国,CN 101024471 B[P].2012-06-27.
作者:吴昊罡
来源:起重运输机械
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!