
环吊是核电厂核岛重要的吊运设备,在机组大修期间,环吊承担着核岛重要设备吊运的功能,环吊能否正常运行对机组大修是否顺利推进具有重要意义。中核核电运行管理有限公司秦山第二核电厂1、2号机组反应堆厂房环吊为西班牙BWE公司制造。环吊共有三个吊钩,分别为5T/10 T /190 T,其中190T吊车(以下简称环吊大车)所运行的轨道为圆形。在环吊大车运行过程中,时常出现大车跑偏,造成大车导向轮与轨道挤死,使环吊大车无法正常运行,同时伴随的现象还有环吊轨道在使用过程中出现偏移,导向轮磨损严重情况。本文根据环吊大车结构及跑偏情况,从理论分析、车轮偏向角、轨道设置、控制方面进行分析,希望得出环吊大车跑偏的根本原因,并提出了一些应对措施。
1. 环吊大车结构及跑偏情况介绍
环吊大车车轮共有四组,分别位于两桥架(电气梁)两端,并通过连接梁相连。每组共有四个车轮,每两个车轮用一个转向架相连,两个转向架通过平衡器连接在一起。在每组的四个车轮中有一个为驱动轮,另外三个为从动轮,电机通过减速箱与驱动轮相连。并且在每组车轮中还有两个导向轮,导向轮位于轨道内侧,在大车运行时,对车轮进行导向作用,在每两个车轮中间下部,安装有与轨道配合的防升降夹,防止车轮出现脱轨现象。具体结构见图1 [1]。
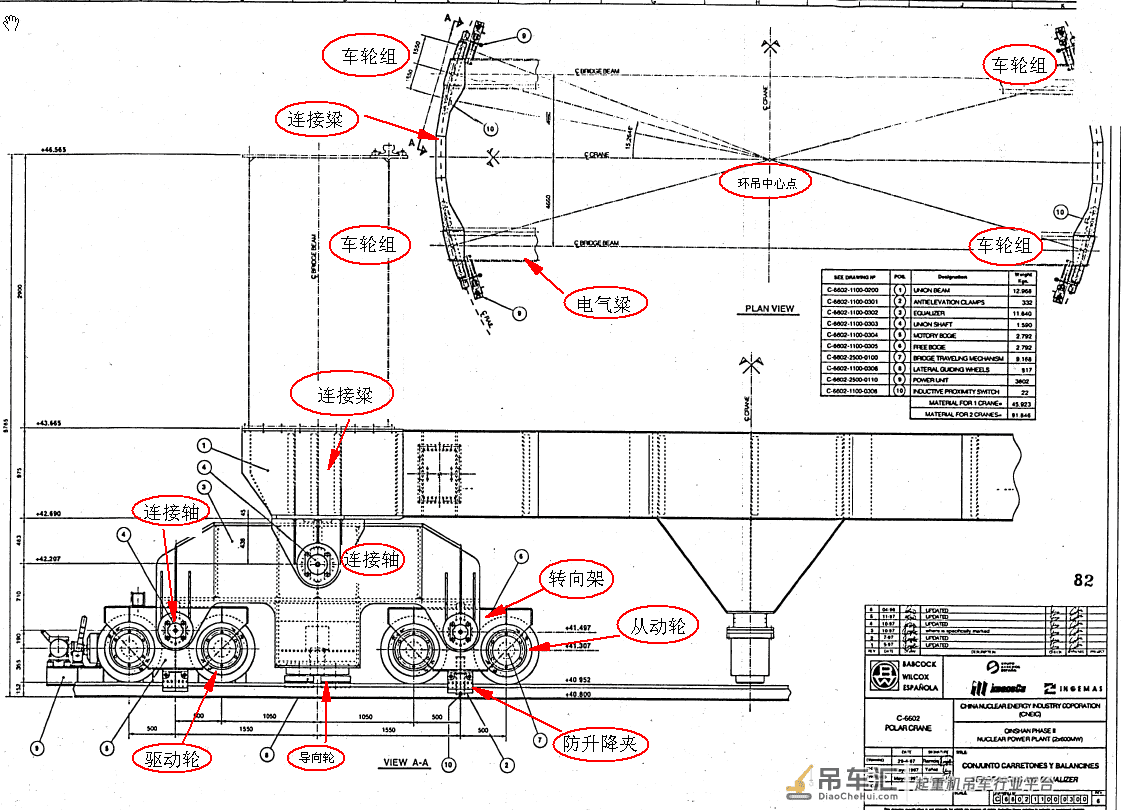
图1 190T吊车结构图
106大修期间对1号机组环吊轨道间隙在环吊使用前及使用后进行了测量,相关数据见表1,导向轮磨损情况见图2。
表1 106大修1#机组环吊轨道间隙测量值
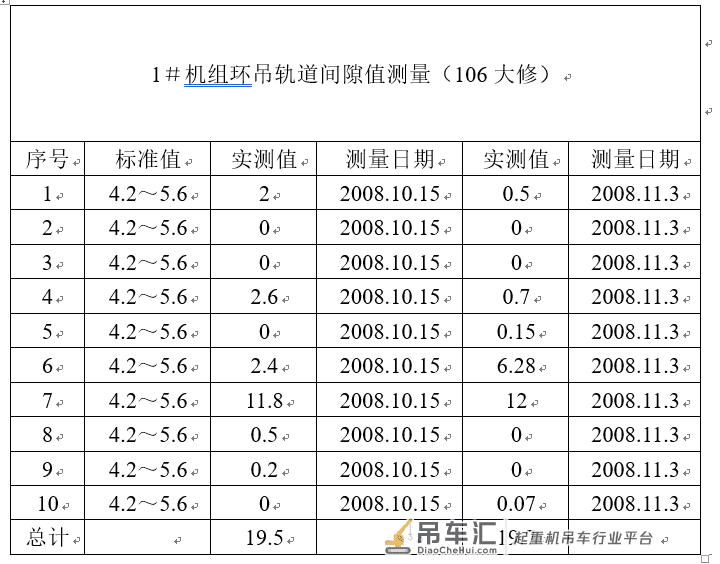
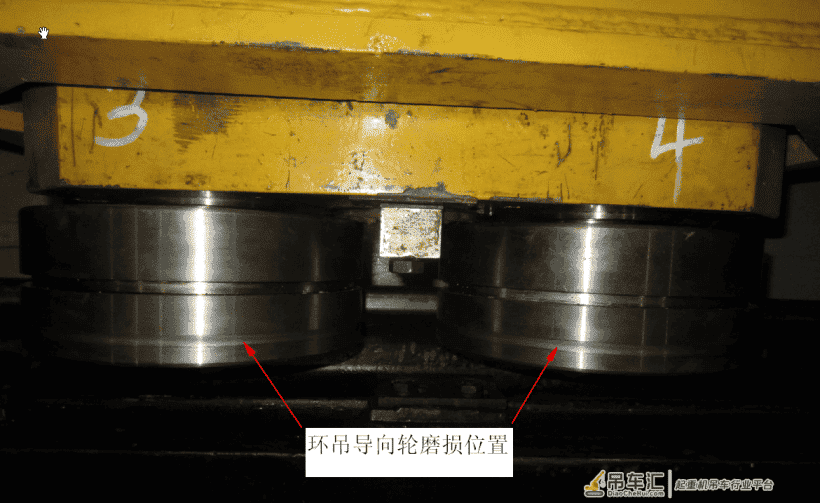
图2 环吊导向轮磨损情况
从表1中可以看出,10.15日测量轨道间隙总计19.5mm与11.3日测量轨道间隙总计19.7mm相差为0.2mm,在测量范围误差内,说明两次测量数据的有效性。另外两次环吊轨道间隙值全不符合标准值,部分轨道间隙为0,轨道已经处于挤死状态,而部分轨道间隙超出标准值过大,同时可以看出经过约半个月环吊的运行,部分轨道间隙又产生了变化,既存在间隙扩大情况,也存在减小情况。另外从图2中也可以看出,导向轮与轨道接触位置磨损位置有明显凹痕,磨损情况明显。
2. 大车跑偏原因分析:
2.1 理论分析:
环吊桥架、连接梁通过大车的四组车轮支撑在轨道上、并在轨道上做圆周运动。理想情况下环吊轨道为标准的圆形,桥架、连接梁及四组车轮旋转的中心同轨道中心一致,并且环吊大车车轮方向在轨道任意位置需同此处轨道切线方向一致。若环吊大车车轮方向与此处轨道切线方向不一致,则在运行过程中会产生额外分力,导致大车跑偏现象发生。以任一组车轮为分析对象进行分析,见图3所示。
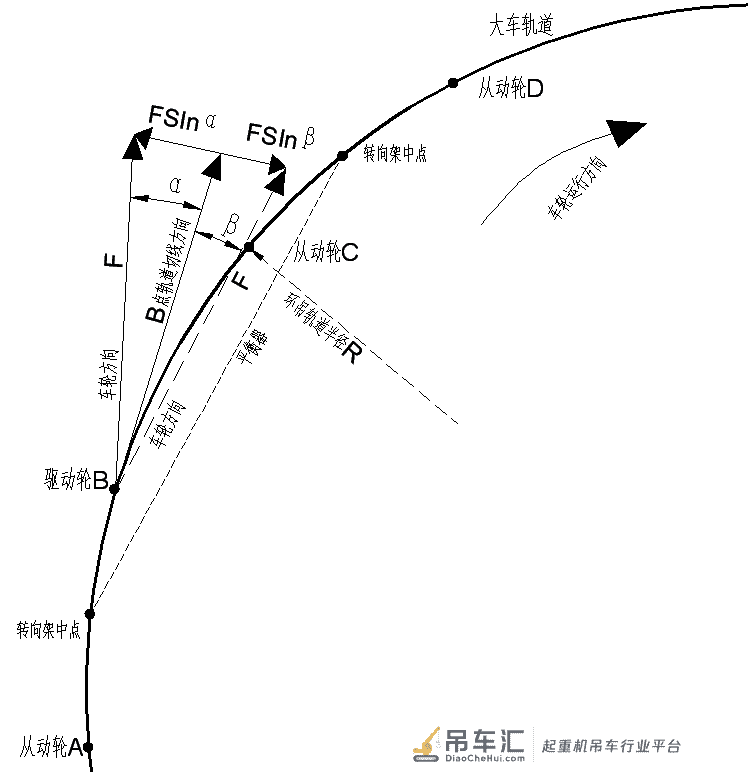
图3 车轮受力分析图
在图3中,每组车轮中共有四个车轮,分别设为A、B、C、D,其中设B车轮为驱动轮,其他的为从动轮。对驱动轮B进行受力分析,假设此时车轮方向在此处轨道切线方向外侧且之间的夹角为α,驱动力为F,车轮运行方向为顺时针(俯视),可以看出驱动力除了提供绕轨道转动的力外,还有一个额外分力,其大小为fsina,方向指向轨道外。α角在实际情况下中很小,但驱动力F很大,其乘积绝对值仍不可忽视。这种情况下,大车会向轨道外侧偏移,环吊与导向轮之间的间隙会减小,造成导向轮磨损,情况严重的话,会导致导向轮与轨道挤死,大车无法运行。
若车轮方向在此处轨道切线方向内侧且之间的夹角为β(虚线表示),驱动力为F,车轮运行方向为顺时针(俯视),可以看出驱动力除了提供绕轨道转动的力外,还有一个额外分力,其大小为
f sin&,方向指向轨道内侧。此时导向轮与轨道之间的间隙会增大,不会发生导向轮磨损情况,但这种情况若没有及时纠正,车轮向内偏移过多后会造成防升降夹与轨道摩擦现象,同样影响大车的正常使用。
车轮方向与此处轨道切线方向一致的情况下,之间夹角为0,此时没有额外分力,则不会产生大车跑偏现象。
2.2 车轮偏向角分析
根据上面的理论分析,若要保证大车在轨道上运行没有跑偏现象,则必须让大车车轮方向与轨道切线方向一致,在环吊车轮的设计中,通过对转向架中心线及车轮轴承架中心线的偏差角设置保证了车轮方向与轨道切线方向一致,见图4[1]。
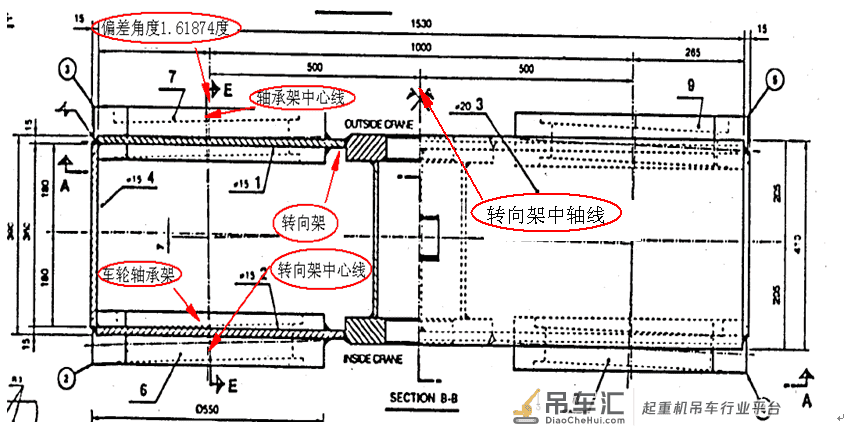
图4 大车车轮结构图
在图4中可以看出,转向架为一平直的框架,而其中安装内部的两个车轮轴承架中心线与转向架中心线存在一偏角。正是这一偏角设置可以保证车轮方向一致与轨道切线方向一致。
对这个夹角进行分析计算,过程如下,见图5。
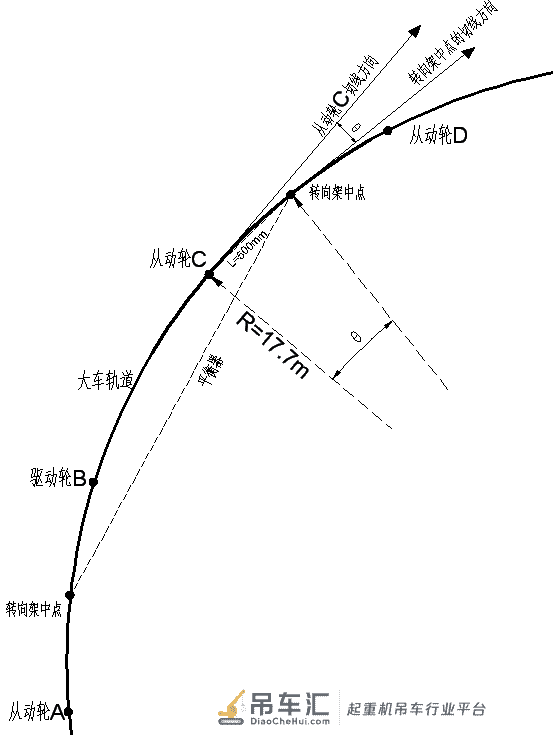
图5 偏向角计算图
在图5中以从动轮C为例,从动轮C与转向架中点的切线方向夹角为
,此角度与从动轮C、转向架中点与轨道中心的夹角相同。从转向架中轴线到每个车轮之间的距离为L=500mm,而环吊轨道半径为R=17700mm,则根据余弦定理计算:
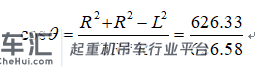
此角度与实际设计图纸相符,因此在这种情况下,环吊车轮方向与其所在轨道切线方向是一致的,此时不会产生额外分力,大车不会走偏,导向轮不会产生磨损现象。
在实际环吊的运行过程中,车轮转向架及轴承架等部件保证了车轮的偏角,而转向架、轴承架等部件在使用过程中一般情况下不会发生改变,因此车轮偏向角一般不会发生改变。而往往是轨道发生变化引起了轨道切线变化,从而导致了车轮的走偏,导向轮的磨损,下面对环吊轨道进行分析:
2.3 轨道设置分析:
在理论分析中,环吊轨道是按照标准的圆形、且固定不动来分析的。而在实际情况中,环吊轨道共有9根(未包含调整段),每段之间留有一定间隙,用来弥补轨道的热膨胀间隙。同时轨道通过环吊轨道压板来固定,压板与轨道之间有环吊轨道压板橡胶条,在大车走偏情况下,可能导致轨道存在一定的偏移。见图6[1]、图7[1]。
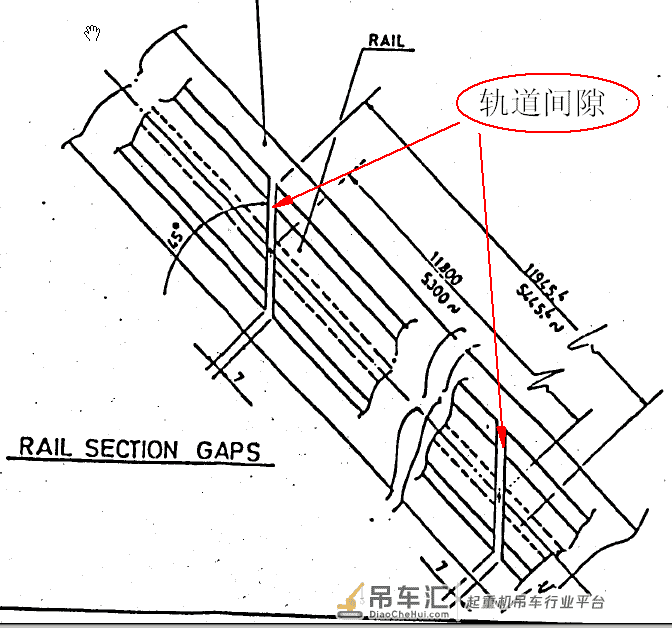
图6 环吊轨道间隙
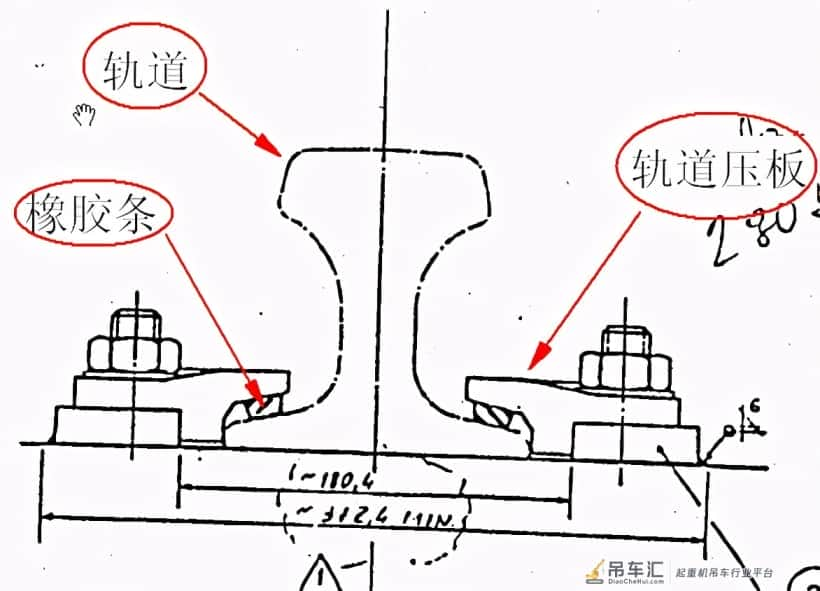
图7 轨道压板
在环吊轨道部分位置出现偏移的情况下,对环吊大车车轮进行分析,见图8。

图8:轨道偏移对大车车轮影响示意图
在图中,实际轨道用实线表示,假设某段轨道P1-P2发生偏移,其理论轨道用虚线表示,则任意取其中两点A、B进行分析,在A点,理论轨道的切线方向为车轮方向,实际轨道的切线方向为切线方向,其夹角设为B,驱动力为F,则其额外分力为Fsinb,在环吊大车运行方向为顺时针(俯视)情况下,方向指向轨道外侧,在这种情况下,根据理论分析结果,大车会向轨道外侧偏移,环吊与导向轮之间的间隙会减小,造成导向轮磨损,影响大车使用。
对B点同样进行分析,则其额外分力为Fsin0,在环吊大车运行方向为顺时针(俯视)情况下,方向指向轨道内侧,根据理论分析结果,此时大车偏向轨道内侧,导向轮与轨道之间的间隙会增大,不会发生导向轮磨损情况,但这种情况若没有及时纠正,车轮向内偏移过多后会造成防升降夹与轨道摩擦现象,同样影响大车的正常使用。
同时可以看出,在P1-P2之间点O处,大车车轮方向与轨道切线方向重合,此时没有额外分力。
因此,在P1-O点之间,车轮方向一直位于轨道切线方向外侧,在O-P2点之间,车轮方向一直位于轨道切线方向内侧,因此车辆在P1-O之间运行时,大车会偏移轨道外侧距离越来约大,若偏移过大,则造成导向轮挤死,使大车无法运行。而在O-P2点之间,大车会偏移轨道内侧越来约大,导向轮偏离轨道越来越远,但防升降夹可能会与轨道产生摩擦,同样影响大车运行。
根据上面对环吊轨道的分析,轨道出现偏移的根本原因为:在车轮方向与轨道方向切线方向不一致时会产生额外分力,会使大车产生偏移,而这个额外分力的反作用力同样会使大车轨道产生一定的偏移。而轨道发生偏移之后,反过来会影响大车偏移。轨道与大车之间相互影响,从而使大车及轨道偏移问题加重。
2.4 大车控制方面分析:
环吊大车车轮共有四组,每组车轮中有一个驱动轮,驱动轮通过电机、联轴器、减速箱进行驱动,车轮在轨道上运行,若要保证大车不跑偏,必须要求四组大车行走距离一致。而在这个过程中存在电机响应是否一致、减速箱减速比是否完全相同,大车车轮直径是否存在偏差等问题,因此不可能保证四组车轮在运行过程中完全一致,需要对这种偏差进行校正。
在控制设置中,在轨道直径方向的两组车轮中的一个自由轮上安装有相应的编码器及PLC控制器,用来保证环吊的旋转中心同建筑物轴线同轴。在环吊直径端点上装有两个传感器,并且在靠近轨道通道处安装有6个实体的重新起始点(按照圆周方向布置,间隔600),它们会对两个传感器发出信号,在大车车轮运行不一致存在偏差时,相应的电机会进行调整。见图9[1]。
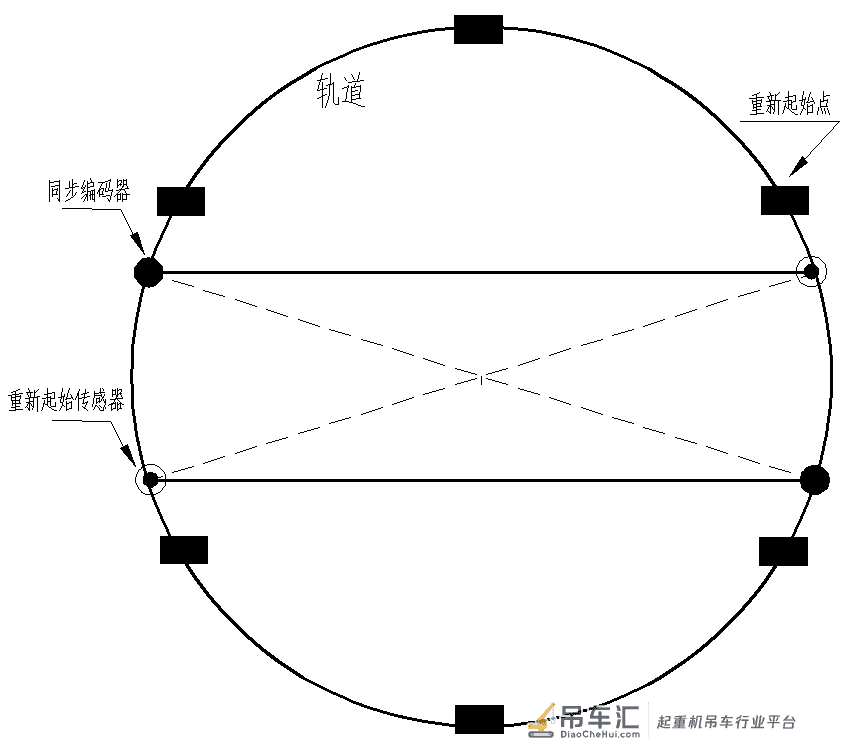
图9 大车控制设置示意图
另外,在环吊司机控制室设置有两个环吊编码器绝对值及差值显示,若在操作吊车过程中出现大车跑偏故障,可以及时发现。
3. 纠正措施:
根据上面对环吊大车跑偏原因的分析,现提出相应的纠正措施,希望能够避免大车跑偏现象的发生。
3.1 环吊润滑
环吊大车车轮偏向角设置由车轮转向架及轴承架等部件确定,因此,在环吊运行过程中,应加强对环吊车轮转向架及轴承架的检查,并定期对大车车轮轴承进行润滑,保证轴承的良好使用性能。
3.2 轨道固定
根据前面对环吊轨道的分析,环吊轨道偏移主要原因为轨道之间存在间隙,轨道压板橡胶条存在可移动性。根本原因为车轮方向与轨道方向切线方向不一致时会产生额外分力的反作用力使大车轨道产生偏移。而根据实际情况,额外分力由于轨道及大车在制造、安装等原因,不可能完全保证车轮方向与轨道方向一致,因此额外分力无法消除,另外轨道之间的间隙需补偿热膨胀性,固定压板橡胶条结构形式难以改变。因此只能通过一定措施控制环吊大车轨道偏移情况。
在107、206大修期间,针对大车轨道偏移情况,对环吊轨道进行了对中调整、并添加了固定装置,固定装置结构见图10。
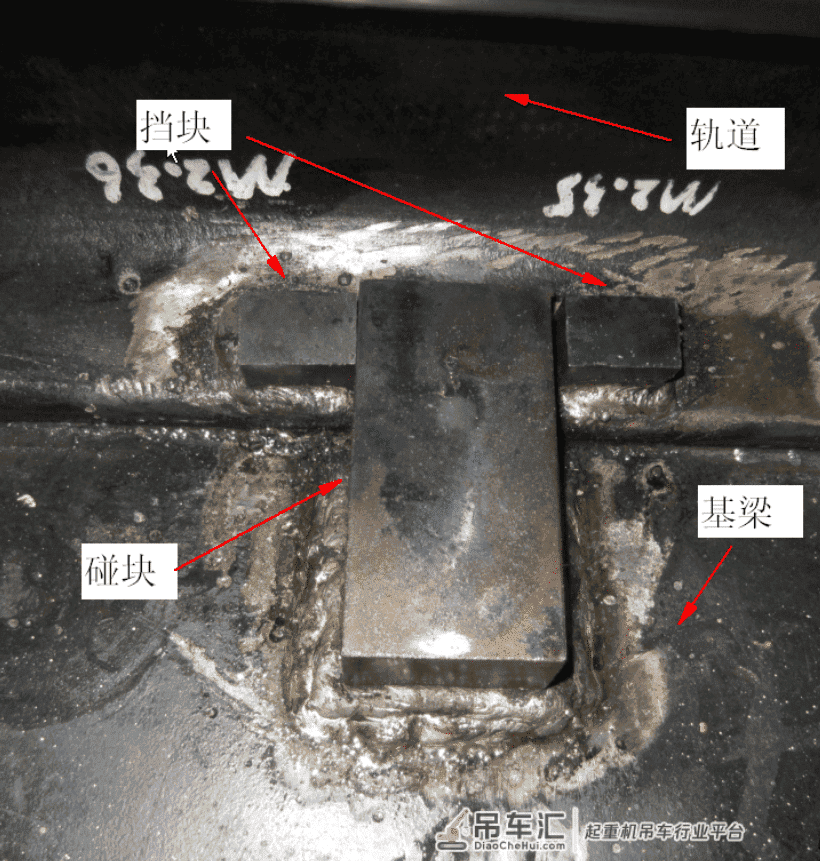
图10 环吊轨道固定装置
在图中,轨道通过轨道压板固定在基梁上,为避免轨道圆周方向偏移,在轨道上焊接了挡块,在基梁上焊接了碰块,并且碰块与挡块之间留有一定的间隙,这样既可以避免轨道偏移过大,又可以弥补轨道产生的热膨胀性。
3.3 大车控制系统检查
根据大车控制分析,环吊大车出现跑偏现象还与控制系统有关,因此,在环吊大车出现跑偏故障时,应首先应检查环吊大车控制系统:编码器差值是否超出要求,编码器是否出现故障等,必要时进行处理,另外也需对传动部件如联轴器、减速箱等也应加强检查,做好相应的保养工作。
3.4 环吊操作
在理论分析中,车轮方向与轨道方向不一致而产生的额外分力方向是在假设环吊大车运行方向为顺时针(俯视)情况下得出的,若环吊大车运行方向为逆时针(俯视),则额外分力方向与原来的方向相反,这样额外分力的反作用力对轨道的受力也相反,轨道就不会一致朝着一个方向偏移,因此,这就要求环吊大车在使用的过程中,不可一直朝着一个方向,而是应该两个方向交替运行,这样大车对轨道偏移的影响会大大减小。
4. 结论
环吊大车跑偏原因有很多方面,根据上面的分析,其根本原因为在车轮方向与轨道方向切线方向不一致时会产生额外分力,会使大车产生偏移,而这个额外分力的反作用力同样会使大车轨道产生一定的偏移。而轨道发生偏移之后,反过来会影响大车偏移。轨道与大车之间相互影响,从而使大车及轨道偏移问题加重。从106大修期间对环吊轨道间隙测量数据变化及导向轮的磨损情况就可以说明这一点。
另外环吊轨道的偏移出现是一个长期的过程,并非短时间就会发生,往往在运行几年之后才会出现这种现象。对于环吊大车偏移的纠正,首先最简单的方法就是在使用环吊大车时顺时针、逆时针交替运行,可以使车轮方向与轨道方向切线方向不一致时会产生额外分力对轨道的偏移影响减小。另外增加环吊轨道固定装置可以在一定程度上限制轨道的偏移量。此外另外几个影响大车偏移的部件也不可忽视,在环吊大车每年的例行检查中,也应加强对环吊车轮润滑、控制系统部件的检查。
来源:设备管理与维修
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!





