刘小光1 吴岳明1 朱慧华1 王立夫2 吴朝霞2
1 宝钢股份上海梅山钢铁股份有限公司 南京 210039 2 东北大学秦皇岛分校控制工程学院 秦皇岛 066004
摘 要:针对桥式起重机水平定位和防摆控制,设计了基于线性模型预测的控制方法,运用拉格朗日方程建立系统模型并线性化。由于水平位移与速度的耦合性,设计了三次多项式形式的水平位移期望函数,以及二次多项式形式移动速度期望函数,以达到精确、平滑、小负载摆角运行的控制目标,并可用以实时控制。搭建Matlab/Simulink 模型进行了仿真验证,表明此控制方式可使起重机在运动过程中速度平滑、定位精确、负载摆角小,无超调响应定位指令,并对负载质量变化、钢索长度变化具有良好的鲁棒性。与已有的模糊PID 控制、LQR、线性自抗扰控制相比,负载摆角抑制效果分别提升87.4%、68.4% 和55%。
关键词:桥式起重机;欠驱动系统;防摆控制;模型预测控制;平滑优化
中图分类号:TH215 文献标识码:A 文章编号:1001-0785(2020)13-0073-06
0 引言
桥式起重机是实现起重运输过程机械化、自动化的重要设备,抑制或消除其负载的摆动对提高起重机的工作效率、排除安全隐患具有重要意义。桥式起重机是典型的欠驱动系统[1],对防摆控制算法提出了高要求。起重机防摆控制方法主要有模糊控制、滑膜控制、自适应控制、神经网络控制、最优控制等。文献[2、3] 设计了双模糊控制器,系统具有较强的鲁棒性,并提升了控制器处理速度,但模糊控制器的规则设计依赖于人的经验,并需要大量的调参工作。文献[4、5] 利用滑膜变结构控制对参数摄动和系统扰动的低敏感性,提升了桥式起重机防摆控制的鲁棒性。文献[6] 采用自适应耦合闭环控制,在线估计系统参数提升控制效果,但参数估计所需计算量较大,难以用于实时控制。文献[7] 利用神经网络可以逼近任意连续系统的特性,采用逆模型控制方法,文献[8] 利用神经网络的学习特性进行参数在线优化,然而神经网络控制方法多见于理论分析,鲜用于实际控制工程中。最优控制中的LQR[9] 只保证局部的有效性,且鲁棒性不强,不能处理约束问题。而模型预测控制[10] 通过局部最优以逼近全局最优,滚动反馈控制使其具备较强的鲁棒性。因此,本文使用线性模型预测控制,在满足桥式起重机精确定位的同时,降低负载摆角,提升动态控制性能,满足实时控制的要求。
1 系统建模
在对桥式起重机运动系统建模时,忽略了吊索质量与其延展长度变化,忽略了空气阻力,假设吊具及负载为质点,起重机与导轨间的摩擦力与起重机速度呈线性关系,如图1 所示。桥式起重机水平运动过程中,提升电机不工作,在满足起重机准确定位的同时应减小负载摆角,并使其迅速衰减为0。因此,水平运动是起重机防摆研究的重点。根据起重机系统的动力学特性,由式
(1)拉格朗日方程得到起重机系统的非线性数学模型,如式(2)所示。

式中:M 为起重机质量,m 为负载质量,v 为起重机的水平移动速度,x 为起重机水平位移,θ 为负载摆角,ω 为负载摆动角速度,F 为起重机水平方向的控制力,L 为吊索长度,μ 为起重机水平运动的阻尼系数。根据小角度近似理论,得到桥式起重机水平运动的线性状态空间方程,即
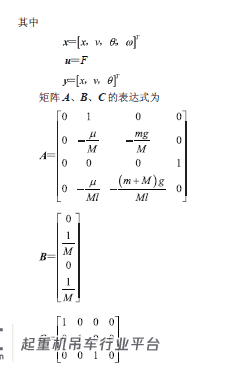
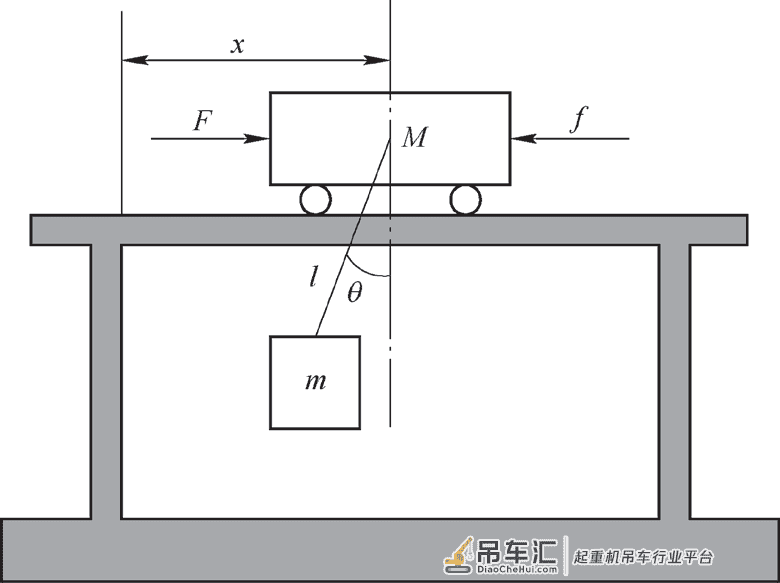
图1 桥式起重机运动系统简图
2 模型预测控制
模型预测控制最早应用于工业过程控制领域,近些年来,在智能车辆运动控制领域得到了广泛应用。模型预测控制可以处理各种约束问题,如控制量约束、状态量约束以及输出量约束等,通过滚动优化、反馈校正,使其具有良好的鲁棒性。
对式(3)利用欧拉公式,将连续状态空间方程离散化

其中,Ad=I +TA, B d=TB, Cd=C, I 为单位矩阵,T 为采样时间。
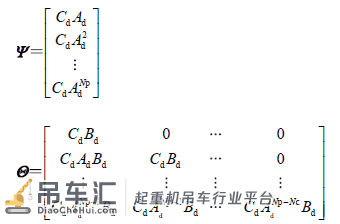
根据模型预测控制理论,可得预测模型为

由于Np 为预测时域,Nc 为控制时域,Y =[y k+1|k,y k+2|k, …, y k+Np|k]T, U=[u k, u k+1, …, u k+Nc]T, 则Ψ 与Θ 的表达式为
设计期望的理想状态是起重机在精确定位的同时,横摆角保持为0,且在起重机到达指定位置时速度为0。然而,若设计期望速度为0,会增大起重机到达指定位置的响应时间;若设计期望速度为恒定值,会增大系统超调和静态偏差的可能性。此外,如式(6)所示,起重机水平的位移和速度具有很强的耦合性,故需合理设计起重机运动过程中的期望位移和速度。

为使起重机平滑的运动,减小冲击度,应保证加速度连续变化,即速度二阶、位移三阶可导。因此,设计期望速度是随时间变化的二次多项式,位移是随时间变化的三次多项式。起重机在水平运动加速过程中,加速度应平滑的逐渐增大,再逐渐减小至0,减速过程中减速度同样如此,以此降低冲击度,保证速度和位移的平滑。起重机系统存在最大速度v max 与最大加速度a max,则当起重机系统存在临界位置,使其可加速到匀速状态运行。由此,当起重机期望定位大于临界位置时,起重机加速至v max 后应该匀速行驶。当起重机的期望定位小于临界位置时,起重机不能加速到最大速度,假设此时的期望定位与最大速v′max 之比等于临界位置与最大速度vmax 之比。此时,起重机加速到最大速度v′max 后立即减速。因此期望速度与位移设计以如图2 所示,其中xc 为临界位移, 并可得xc = 2v2max/amax。
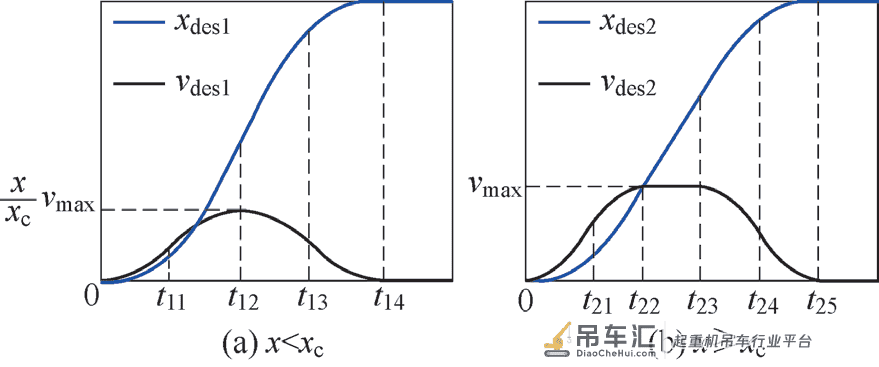
图2 期望速度与位移示意图
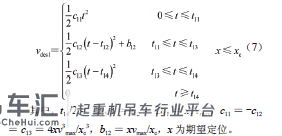
当起重机的期望定位小于临界值xc 时,起重机先加速至最大加速度,然后加速度减小至0,起重机达到最大速度,再减速度逐渐增大至最大值后减速度逐渐减小至速度与减速度为0,则期望速度为
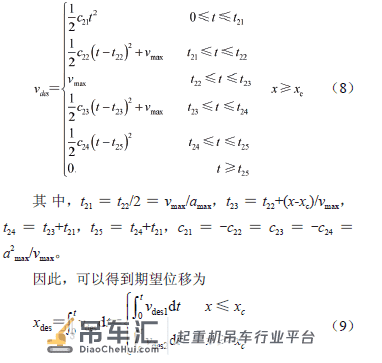
当起重机的期望定位大于临界值xc 时,起重机先加速至最大速度后匀速再减速,则期望速度为
综上所述,可得桥式起重机模型预测控制的优化函数为
式中:F min、F max 分别为水平控制力的最小值和最大值,Q、R 分别为状态量和控制量的权重矩阵。将求解最优化问题转化为二次规划(QuadraticProgramming,QP)问题,即可求解出最优控制量。
3 仿真验证
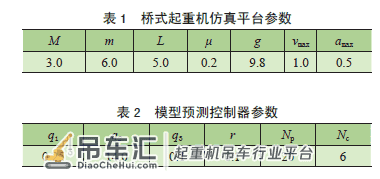
为了验证模型预测控制器的控制效果,在Matlab/Simulink 环境中搭建了桥式起重机防摆控制的仿真平台,其主要包括防摆控制模块和桥式起重机物理模型模块。采用文献[11] 中桥式起重机模型参数设置,如表1所示。模型预测控制器参数如表2 所示,其中q1、q2、q3 和r 分别是位移权重、速度权重、负载摆角权重和控制力权重。
起重机的最大速度为1 m/s,最大加速度为0.5 m/s2,可得在期望速度与位移的临界位置为4 m。为了验证期望速度和位移函数的设置效果与跟踪效果,分别设定期望定位为3.0 m、4.0 m、10 m,仿真结果如图3 所示。由此可知,模型预测控制可跟踪期望位移,最终到达指定定位,并在此过程中速度与位移平滑变化,能抑制负载摆角。
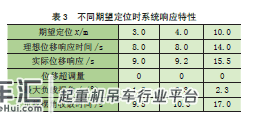
由表3 可知,基于模型预测控制的桥式起重机可以到达任意指定定位,且无超调发生。期望定位越大,起重机到达期望定位的时间也越大。同时,由于系统非线性、运行中误差积累等原因,起重机的响应滞后(实际位移响应滞后于理想响应的时间)也越大。由图3 可知,起重机指定定位为3 m、4 m 时,速度增大至最大速度后,开始减速。当指定定位为10 m 时,起重机增大至最大速度后以近似匀速的速度行驶,然后再减速至0。在起重机所有的加减速过程中,速度变化平滑,符合设计预期。由负载摆角曲线变化可知,随着期望定位的增大,负载最大摆角随之增大,最大值为2.3°。此外,负载摆角收敛至0 的时间滞后于位移响应时间,即起重机到达期望定位后负载摆角仍有极微小的摆动,并随期望定位的增大,负载摆角收敛所需时间增大。当起重机在14 s 到达指定10 m 定位时,此时负载摆角为-0.5°,为最大摆角的21.7%,之后迅速收敛至0。此外,负载摆角与起重机加减速过程同周期变化,进入匀速行驶后震荡幅度极小。由此可见,基于模型预测的控制器在精准定位、速度平滑、负载摆角抑制方面具有良好的性能。
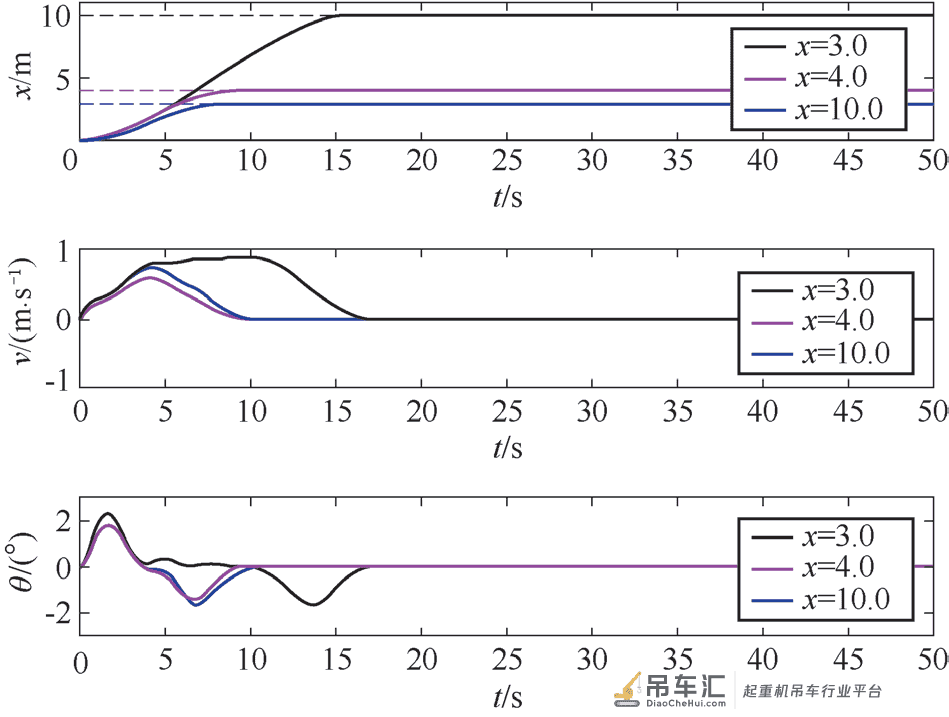
图3 不同期望定位仿真结果
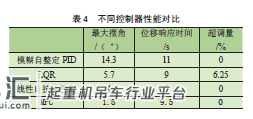
当起重机期望定位为3 m 时,与不同控制器各项性能指标对比如表4 所示。与文献[11] 设计的LADRC(线性自抗扰控制)算法相比,系统响应速度虽然减缓,但负载摆角抑制效果更加显著,控制效果提升55%。与文献[12] 设计的模糊控制器和LQR 控制器相比,系统响应时间及负载摆角都大幅度减小,位移响应时间分别提升13.6% 和5.5%,负载摆角抑制效果分别提升87.4%和68.4%。由此可见,基于模型预测的起重机防摆控制效果显著。
考虑到起重机实际工作中的负载质量并非固定,甚至是成倍变化。负载质量的变化会引起MPC 控制器的模型失配,故设计负载质量分别为3 kg、12 kg 来验证控制效果,不同负载质量的控制效果如图4 和表5 所示。由此可知,虽然负载质量发生了变化,但起重机均可无超调完成期望定位。当负载质量为3 kg 时,起重机运行速度增大,位移响应时间减小为8.5 s,负载最大摆角增大为2.4°,且收敛过程中波动加剧,收敛时间增大至40 s,但在17 s 后,负载摆角可收敛到0.5°之内。当负载质量为12 kg 时,起重机运行速度减小,且变化更加平滑,位移响应时间增大为11 s,负载最大摆角减小为1.2°,且波动周期变大,收敛时间增大至13 s。由此可知,负载变化会影响控制器性能,但起重机都可无超调完成期望定位,负载质量减小会较严重的恶化负载摆角,使最大负载摆角及收敛时间增大;而负载质量增大会使负载摆角减小,稍微增大收敛时间。
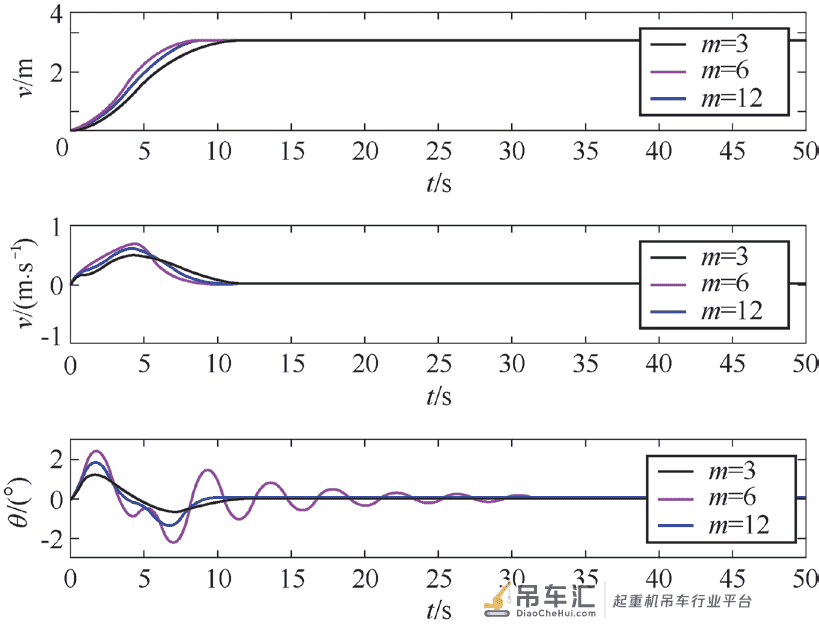
图4 不同负载质量仿真结果

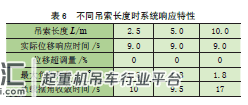
与负载质量会发生变化一样,起重机的钢索长度在工作中也是变化的,其同样会引起MPC 控制器的模型失配,影响控制器性能,故设计钢索长度分别为2.5 m、10 m 来验证控制效果,不同钢索长度的控制效果如图5和表6 所示。由此可知,钢索长度的变化会对起重机移动速度有稍微的影响,但对起重机的水平位移基本无影响。对于负载摆角的影响,起重机长度的增大会使负载摆角增大,震荡加剧。然而基于模型预测的控制效果却不同于此,钢索长度的变化对负载最大摆角几乎无影响,但的确会增大负载摆角的收敛时间。钢索长度减小对负载摆角的收敛时间影响较小,钢索长度的增大会使负载摆角的收敛时间增大。当钢索长度增大为10 m 时,相较于吊索长度为5 m 时,收敛时间增大了近乎一倍,但负载摆角在8 s 时即可收敛至0.5°之内,可见模型预测控制对由钢索长度造成的模型失配有良好的鲁棒性。
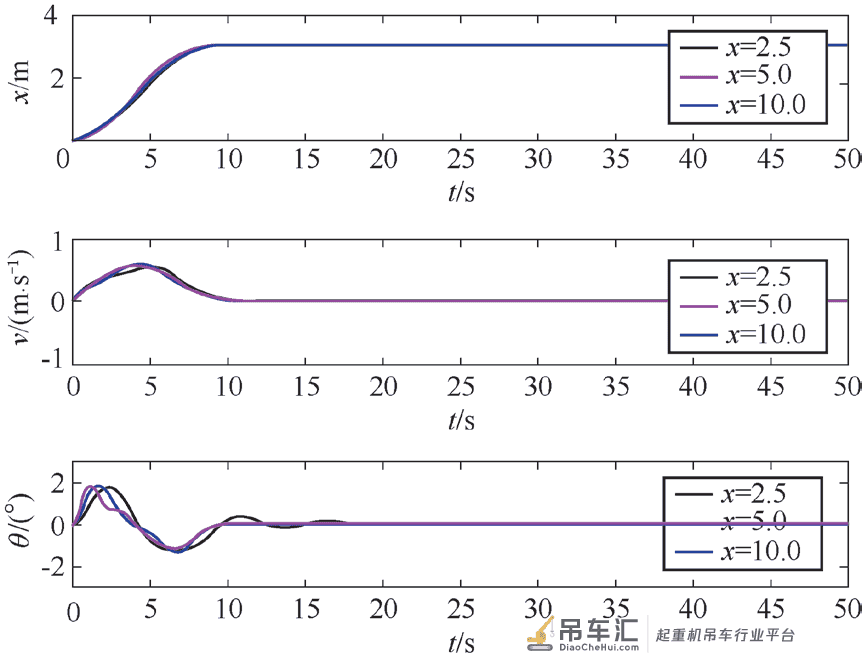
图5 不同吊索长度仿真结果
由上述分析可知,采用模型预测控制的桥式起重机防摆控制,在定位运动过程中,速度变化平滑,定位准确,负载摆角小。相较于其他控制方式,负载摆角抑制效果至少提升了55%,且能克服负载质量变化、吊索长度变化的扰动。
4 总结
为了实现桥式起重机的平滑水平定位与防摆控制,本文设计了基于模型预测控制的线性跟踪控制器,并设计使起重机平滑运动的速度与位移函数。与其他控制方式相比,文中所述方法可优化起重机的水平运动,还可大幅提升负载摆角的抑制效果,并可用以实时控制。通过起重机定位变化、负载质量变化、钢索长度变化验证了基于模型预测的防摆控制具有一定的鲁棒性,尤其应对钢索长度变化效果良好。但负载质量的大幅变化确实对控制性能有一定的影响,故在后续工作中将结合在线参数辨识等方法,减小负载质量变化对模式失配造成的影响,进一步提升控制效果。
参考文献
[1] 郭卫平,刘殿通. 二级摆型吊车系统动态及基于无源的控制[J]. 系统仿真学报,2008(18).
[2] 华克强,高淑玲,朱齐丹. 吊车防摆技术的研究[J]. 控制理论与应用,1992(6):631-638.
[3] 高淑玲,朱齐丹. 吊车稳定系统模糊控制器研究[J]. 自动化技术与应用,1989(4):39-42.
[4] 彭继慎,刘盼,宋立业. 倒立摆的神经网络自适应滑模控制[J]. 控制工程,2018,25(11):1 976-1 981.
[5] 罗俊尧. 桥式起重机的防摆控制方法研究[D]. 太原:太原科技大学,2011.
[6] Sun N,Fang Y,Chen H,et al.Adaptive Nonlinear Crane Control With Load Hoisting/Lowering and Unknown Parameters:Design and Experiments[J].Mechatronics, IEEE/ASME Transactions on,2015,20(5):2 107-2 119.
[7] 丁瑞华,李娜,李伟. 基于神经网络算法的桥式起重机防摇摆控制[J]. 机电工程,2009(10):31-34.
[8] 杨春燕. 桥式起重机定位和防摆的RBF 神经网络控制[J].中国科技论文在线,2011(4):320-324.
[9] 刘保朝,贾红雨,陈能祥. 基于LQR 算法的三维桥式吊车定位及防摆控制研究[J]. 计算机测量与控制,2018,26(6):97-101.
[10] Wang L.Model Predictive Control System Design and Implementation using MATLAB[M].Springer London 2009.
[11] 唐超,刘惠康,曹宇轩,等. 基于鸟群算法优化的桥式吊车线性自抗扰控制[J]. 高技术通讯,2019,29(4):73-80.
[12] 蒋理,陈树广. 基于模糊控制的桥式起重机定位防摆研究[J]. 计算机仿真,2009(6):191-194.
来源:起重运输机械
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!