甘 晶
江苏省特种设备安全监督检验研究院 南京 210036
摘 要:起重机故障诊断的实质是对故障样本的分类识别,无监督的自组织特征映射SOFM 网络具有高度的并行处理能力和容错能力,是解决缺乏先验知识指导的复杂机械故障诊断难题的有效工具。文中采用主成分分析法进行故障样本属性约简,以提高基本SOFM 网络的收敛速度;采用加权夹角余弦距离进行相似性判定来提高故障样本聚类的准确性。仿真结果表明:改进的SOFM 网络模型能够准确地进行起重机故障诊断,具有直观、高效等优点。
关键词:起重机;故障诊断;自组织特征映射网络;主成分分析
中图分类号:TH213.3 文献标识码:A 文章编号:1001-0785(2018)10-0152-06
0 引 言
由于起重机的系统结构比较复杂,且大多工作环境恶劣,加之使用不当等人为因素,在生产过程中经常发生安全事故。因此,亟需从系统分析的观点出发,利用各种检测方法和监视诊断手段,利用检测数据的特征判别起重机系统的工况状态,为预知维修及管理提供可靠依据[1]。
人工神经网络是通过模仿人类大脑神经元的功能结构建立的一种非线性动力系统[2,3],由于具有良好的联想记忆、自组织、自学习及非线性映射能力,已成为解决起重机故障诊断难题的一种有效途径。基于BP 神经网络的起重机故障诊断研究大致可以分为两大类:一类是基于传统BP 神经网络的故障诊断技术,例如:利用BP 神经网络进行桥式起重机轴承故障诊断[4]、电气设备故障诊断[5,6]、塔式起重机综合诊断[7,8]、桥(门)式起重机检验评价[9] 等。另一类是基于改进BP 神经网络的故障诊断技术,例如:利用粒子群优化BP 神经网络进行起重机液压系统故障诊断[10]、利用遗传算法优化BP 神经网络进行塔式起重机故障诊断[11]、结合小波分析和BP 神经网络进行港口起重机疲劳断裂诊断[12] 等。此外,还有基于RBF 网络、PNN 网络等其他神经网络模型的起重机故障诊断技术[13,14]。
这些神经网络模型在起重机故障诊断中各具优势,也各有局限,尤其是有监督的BP 神经网络存在着诸如训练速度缓慢、局部极小问题、突然遗忘现象、网络结构的确定缺乏严格理论依据等不足。芬兰学者T.Kohonen提出的自组织特征映射(Self-organizing Feature Map,SOFM)网络是无监督学习的神经网络模型,可对外界未知环境或故障样本空间进行学习或模拟,不需要具有先验知识[15,16]。与BP 神经网络及其各类衍生模型相比,SOFM 网络更适用于复杂环境中的起重机故障诊断,具有更好的普适性。
为提高基本SOFM 网络的训练收敛速度和故障样本识别准确性,本文首先利用主成分分析(PrincipalComponent Analysis,PCA)方法对输入的故障样本属性进行降维处理,并用加权夹角余弦距离选择竞争层的最优匹配神经元(Best Matching Unit,BMU),最后将改进的SOFM 网络模型应用于塔式起重机故障诊断中进行验证。
1 SOFM 神经网络原理
1.1 网络拓扑结构
神经生物学的研究成果表明,人类的脑组织是由大量相互作用的神经元组成的,脑组织通过聚类过程将接收到的外界刺激信号有序地映射到大脑皮层的不同区域。受此启发,SOFM 网络的主要思想就是将任意维度的输入信号以拓扑有序的方式自适应地转换为一维或二维的离散映射。
SOFM 网络的拓扑结构可用一维线性或二维阵列表示,二维阵列如图1 所示。网络输入层是一维的神经元,用来模拟感知外界输入信号的视网膜。网络输出层(即竞争层)是二维结构的神经元网格,用来模拟对输入信号做出响应的大脑皮层。所有输入层神经元和竞争层神经元都存在互相连接关系。
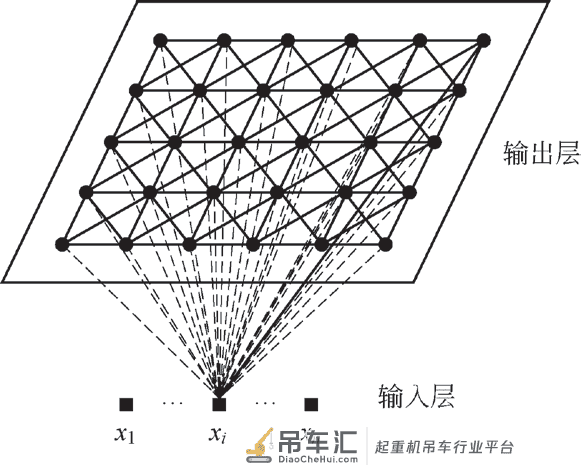
图1 二维SOFM 网络拓扑
神经元间的信息交互方式有多种,位置邻近的神经元间的局部交互方式是侧向交互,即近邻者相互激励,远邻者相互抑制,更远者则是弱激励作用,如图2 所示。位置邻近的神经元通过这种侧交互作用,在竞争过程中自适应地形成针对特殊信息的组织结构。
图2 神经元侧交互模式
1.2 网络学习算法
基本SOFM 网络的学习算法分多个步骤进行:步骤1:初始化网络中连接输入神经元和输出神经元间的权值向量,对其赋予较小随机值,即

式中:j =(1,2,…,p ),p 为输出层神经元总数;m 为输入层神经元的总数;令时间计数器t = 0。步骤2:输入训练故障样本,即

步骤3:计算输入故障样本与所有输出神经元连接权值的欧氏距离,即

式中:k = 1,2,…,m 。
步骤4:通过计算结果选择最佳匹配神经元c,使对于任意的j 都有

步骤5:修正竞争层获胜神经元c 与邻域N c(t )内神经元的权值向量W c(t ),即

其中,学习因子α (t )(0 <α (t )< 1)是递减的增益函数,保证了学习过程的收敛性。通常取

或

步骤6:令t =t + 1,如果达到训练终止的条件(聚类不再改变)或达到最大的训练次数,则学习结束。否则,转步骤2 重复执行。
从基本SOFM 网络的学习算法可知,该网络模型存在缺陷,如学习收敛速度较慢,网络性能对初始条件比较敏感等。为了提高SOFM 网络模型的起重机故障诊断性能,本文对该模型做了改进。
2 SOFM 神经网络的改进
2.1 输入故障样本降维
为了更综合、更准确地反映研究对象的特征及规律,一般会尽量多地考察与其相关的各种属性指标。这种方式不可避免地会造成信息重叠,甚至会掩盖对象的真正特征与内在规律。因此,人们希望用尽量少的指标表达尽量多的信息,PCA 正是研究如何通过原属性指标的少数几个线性组合来解释原属性指标绝大多数信息的一种多元统计方法[17]。其基本过程如下:
步骤1:设n 个样本、p 个属性指标构成数据矩阵X =(xij)n×p,经标准化处理后得到标准化矩阵Y =(yij)n×p,即有
式中: 分别为第j 个指标的均值和标准差。
分别为第j 个指标的均值和标准差。
步骤2:建立标准化相关系数矩阵( ) ij R= r p×p,即有
步骤3:求矩阵R 的特征值及特征向量。如果能通过正交换Q ,即有
则λ 1,λ 2,…,λ p 即为R 的p 个特征值。
设λ 1≥λ 2≥…≥λ p > 0,则Q 的各列[ ,…, ]T j ij pj l =l l 即为λj 所对应的正则化特征向量。
步骤4:建立主成分。按累积方差贡献率 的准则确定k ,从而建立前k 个主成分为
的准则确定k ,从而建立前k 个主成分为

式中:y 1,…,yp 为标准化指标变量。
步骤5:计算前k 个主成分的样本值。
由上可知,PCA 能在最大限度地携带原始属性指标中有用信息的前提下,有效降低输入起重机故障样本的维数,且新变量之间互不相关。因此,本文使用PCA进行故障样本的属性约简,以提高基本SOFM 网络的收敛速度。
2.2 最优匹配神经元选择
在基本SOFM 网络模型中,BMU 神经元依据输入样本与所有输出神经元连接权值的最小欧氏距离选择,体现的是样本指标特征的绝对差异性。而余弦角距离采用样本向量间夹角的余弦值来衡量样本向量之间的相似性,这种方式更加注重样本向量之间方向上的差异性。
利用PCA 降维后生成的新向量与所有输出神经元的连接权值的余弦角距离为
基本SOFM 网络在计算欧氏距离时,各样本指标的重要性并未赋予权重进行区分。在实际应用中,每个样本的指标所起的作用往往不同,不加区别地以相同权重进行处理将会导致神经元的匹配误差,出现BMU 选择不当的现象。
本文在余弦角距离的计算中,考虑到样本各指标的权重差异,依据用加权的余弦角距离公式进行BMU 的选择
式中:权重αi 为主成分贡献率。
3 起重机故障诊断与分析
3.1 样本预处理
为验证本方法,采用文献[11] 中的7 种塔式起重机常见故障数据进行故障诊断。如表1 训练样本数据和表2 检测样本数据所示,故障p 1 表示起重量大,故障p 2 表示塔式起重机刚度不够,故障p 3 表示起重力矩大,故障p 4 表示起升高度大,故障p 5 表示起重幅度不合适,故障p 6 表示风速大,故障p 7 表示支撑点松动。x 1 x 9分别表示塔式起重机9 个故障监测点的传感器形变量测量数据。
首先,根据主成分分析算法对表1 中的故障训练样本数据进行分析,得到表3 所示的主成分分析结果表。由表可知,前4 个主成分的累积贡献率已达到89.433%,说明前4 个主成分基本包含了全部测量指标所具有的信息。利用这4 个主成分,即可在保证原始样本数据信息损失最小的情况下,有效降低起重机故障样本属性指标的维数。尤其是在起重机故障样本属性指标(故障类型分类较细,故障监测点较多)较多的情况下,利用主成分分析进行故障样本降维,可加快SOFM 网络的收敛速度。
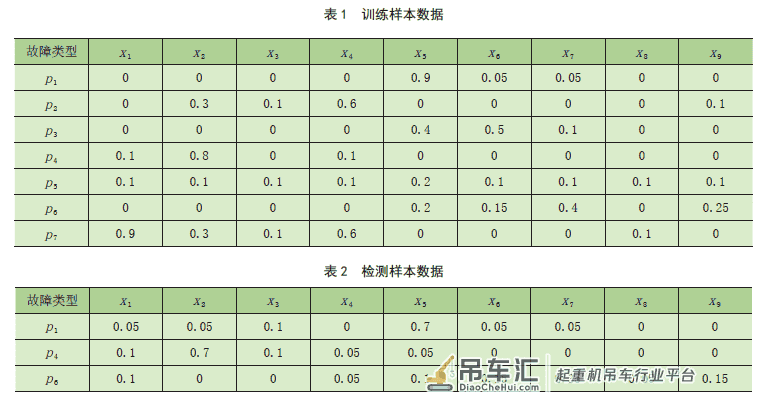
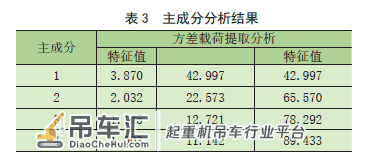
图3 所示是全部特征值的散点图,也可利用该图直观地看出个主成分的重要程度。由图可见,从第4 个主成分开始,特征值就比较低了,这也说明在主成分选择时4个主成分即可。
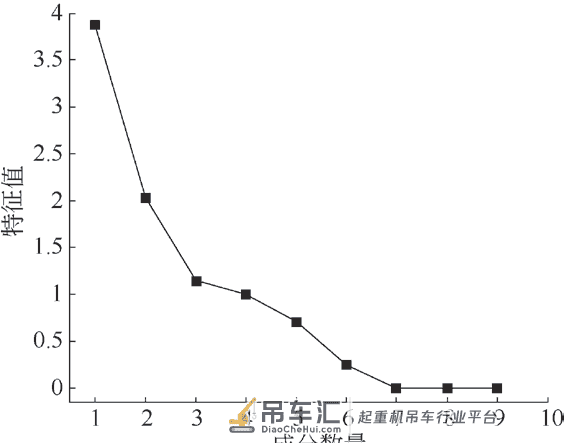
图3 特征值散点
3.2 SOFM 网络仿真
在对表1 所示塔式起重机故障训练样本进行主成分分析的基础上,本文利用Matlab R2013a 对改进的SOFM 网络模型进行仿真验证。网络输入为加权训练样本主成分数据,输出层拓扑结构为6×6 的hextop,距离函数采用加权角余弦函数,排序阶段学习率为0.9,收敛阶段学习率为0.15,邻域距离为1。为加快网络收表4 所示为抽取的主成分载荷,根据该表数据可计算得出4 个新的故障样本指标,即敛的过程,从输入样本空间随机选择样本向量给连接输入神经元和输出神经元的权重向量赋初值。经过250 次迭代后训练,每个故障样本就都能够被稳定地诊断为一类。
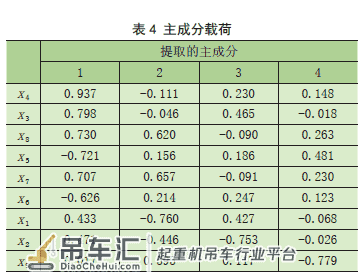
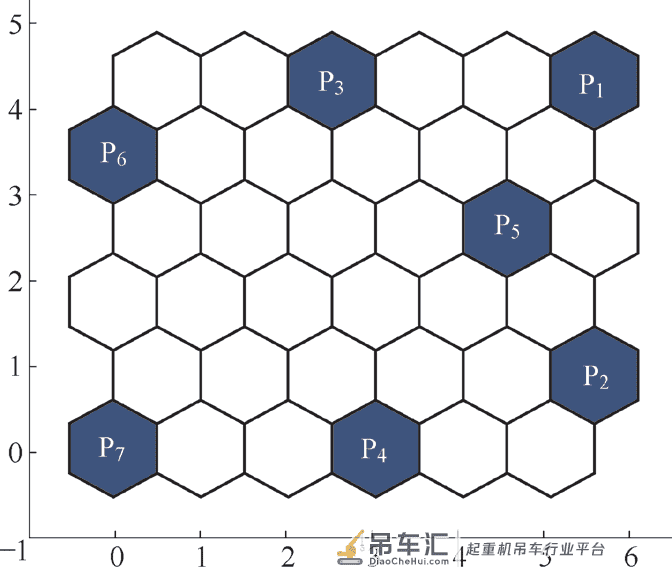
图4 为改进的SOFM 网络完成训练后获胜神经
3.3 结果分析
为验证改进的SOFM 网络的起重机故障诊断能力,将表2 检测样本数据经主成分分析处理后,输入到训练好的SOFM网络进行测试,结果如图5 所示。由图5 可知,3 个不同类型的故障样本都得到正确识别。其中,故障类型为p 6 的故障样本激发的神经元编号为19 号,在位置上最接近25 号的神经元,故可诊断该输入样本的故障类型为p 6,结果与实际的起重机故障状态相符。
为了比较改进SOFM 网络模型和基本SOFM 网络模型在输入故障样本训练时间上的差异,在相同网络设置和训练样本条件下,对不同训练轮数的总执行时间进行统计,结果如图6 所示。可以看出,改进的SOFM网络模型具有较快的训练速度,平均时间大约是基本SOFM 网络模型的86.2%。
4 结 论
起重机故障诊断是项复杂的系统工程,尤其当故障样本指标繁多且无先验知识指导时,现有的监督学习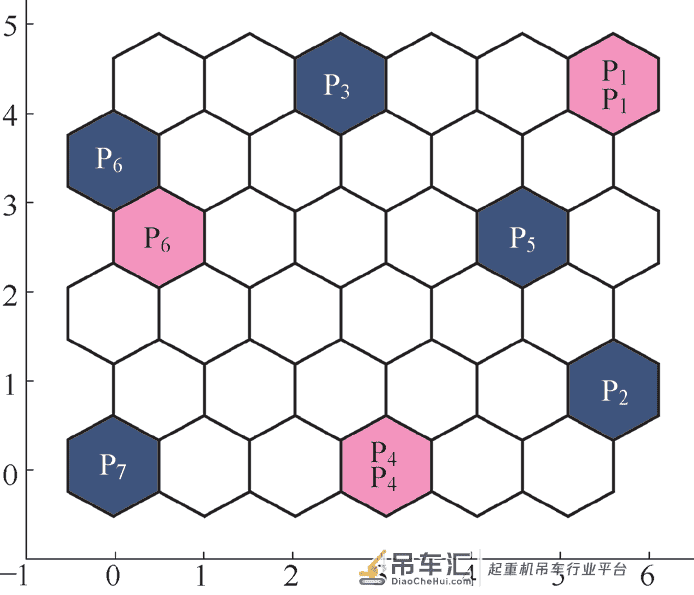
图5 故障诊断结果
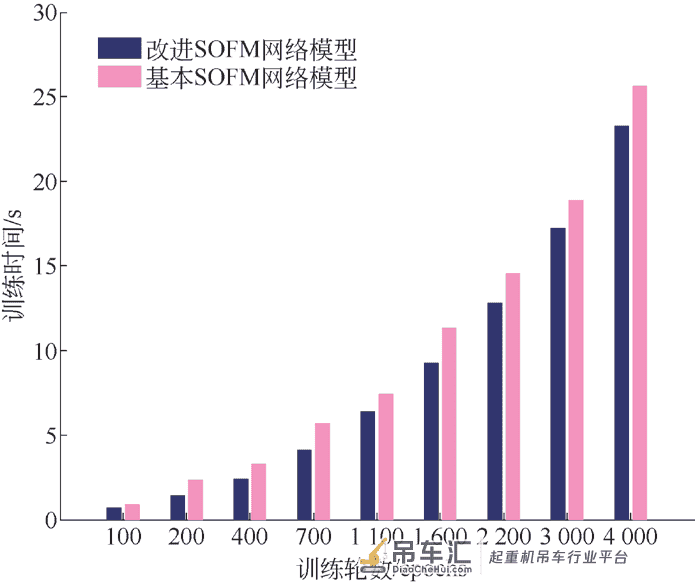
图6 训练时间比较
神经网络方法就难以实现有效地故障诊断。SOFM 网络是自组织无监督学习网络,它能自动、直观地寻找故障样本中的内在规律和本质属性,尤其适用于故障样本数据量巨大、存在未知类型故障的复杂场景。本文在基本SOFM 基础上进行了改进,减少了网络计算复杂度,提高了故障样本聚类准确性,使之更适用于重机故障诊断领域。此外,该方法具有较好的泛化性,能够方便地推广到各类起重机的故障诊断应用中。
参考文献
[1] 钟秉林,黄仁. 机械故障诊断学[M]. 北京:机械工业出版社,1997.
[2] HAYKIN S. 神经网络与机器学习[M]. 北京:机械工业出版社,2011.
[3] HAGAN M T,DEMUTH H B,BEALE M H. 神经网络设计[M].北京:机械工业出版社,2002.
[4] 韩军. 用神经网络技术诊断桥式起重机轴承故障[J]. 起重运输机械,2002(1):35-37.
[5] 王丁磊. 基于神经网络的塔式起重机电气设备故障诊断系统[J]. 起重运输机械,2010(3):83-86.
[6] 吴杰. 塔式起重机智能监控及故障诊断系统[D]. 郑州:郑州大学,2005.
[7] 禹建丽,周瑞芳. 基于神经网络的起重机运行可靠性状态监测[J]. 起重运输机械,2015(12):100-105.
[8] 梁凯. 基于ARM 的塔式起重机监控系统研究与开发[D].沈阳:沈阳理工大学,2012.
[9] 马小蓉,马潞潞,都的箭. 基于MATLAB 的BP 神经网络在煤矿桥( 门) 式起重机检验中的应用[J]. 煤矿机械,2012,33(8):212-214.
[10] 游张平,江洁,胡小平,等. 起重机液压系统的粒子群神经网络故障诊断[J]. 液压与气动,2014(1):114-118.
[11] 尚敬强,原思聪,卫东东,等. 基于遗传算法的BP 神经网络在塔式起重机故障诊断中的应用[J]. 起重运输机械,2012(4):61-64.
[12] 黄祥声,肖汉斌. 小波分析和神经网络在超声波检测中的应用[J]. 港工技术,2008(3):13-15.
[13] 杨行舟,程文明,许明恒. 基于RBF 神经网络的门式起重机故障诊断系统的研究[J]. 中国工程机械学报,2013,11(4):337-339.
[14] 付芹,谷立臣.PNN 在塔式起重机故障诊断中的应用[J].起重运输机械,2010(3):87-89.
[15] Kohonen T.Self-Organizing Map[J].Proceedings of the IEEE,1990,78(9):1 464-1 480.
[16] KOHONEN T.Self-Organizing Maps[J].Astrophysical Journal Supplement,1994,30(2):357-367.
[17] 余锦华. 多元统计分析与应用[M]. 广州:中山大学出版社,2005.
来源:起重运输机械
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!