陈 力 刘关四 丁克勤
中国特种设备检测研究院 北京 100029
摘 要:服役期超过15 年的起重机械都会出现一定程度的结构疲劳损伤,如果直接报废和完全更新这类起重机械既不经济也不符合国情,故有必要科学合理地对服役期超过15 年的起重机械进行系统的安全评价。文中构建基于隶属度函数模型的模糊综合评判法,结合层次分析法进行各级指标的权重分析,最终给出起重机械的系统安全评价方法。特别是提出了程序化产生模糊关系矩阵的隶属度函数模型,通过对实际工程案例的应用比较,发现该模型具有较好的预测结果,可以应用到起重机械系统安全评价软件系统的开发中。
关键词:起重机械;隶属度函数模型;系统;安全评价方法
中图分类号:TP277:TH215 文献标识码:A 文章编号:1001-0785(2018)12-087-08
0 引言
随着服役期的增加,在役起重机多次出现关键结构件疲劳断裂的重大事故,造成重大经济损失和人身伤亡。服役期超过15 年的起重机械都会出现一定程度的结构疲劳损伤,如果直接报废和完全更新这类起重机械既不经济也不符合国情。因此,亟需发展科学合理地起重机械整机系统安全性评价,既保证运行安全又合理延寿,并为超长期限服役起重机械的报废提供参考。
故障模式及其影响分析[1, 2] 和危害度分析等是起重机械安全评价广泛采用的定性分析方法;起重机械安全评价的定量分析方法主要有指数法[3, 4]、故障树分析[5, 6]等。相较于单独采用的定性或定量分析方法,采用层次分析法[7] 和模糊评判法[8] 的起重机械系统安全评价可同时定性和定量地对起重机械进行系统安全评价,是更科学有效的起重机械系统安全评价方法。
对于起重机械关键结构的安全评价,综合采用层次分析法和模糊数学方法已得到了应用。文献9 将岸边集装箱起重机的结构划分为整机、金属结构、子系统、单构件及其影响因素5 个层次,结合模糊综合评判理论,提出了岸边集装箱起重机结构的安全评价方法。
需要指出的是,起重机械模糊综合评判的模糊关系矩阵的产生主要采用专家打分法。如果进行大量起重机械系统的安全评价,每个起重机都采用专家评分法则需要大量的人力、物力和时间。如能建立一种可生成模糊关系矩阵的模型,将能极大地提高起重机械系统安全评价的效率。
1 起重机械的系统安全评价方法
1.1 层次体系划分
起重机械的层次结构之间包含清晰的逻辑关系和表达形成结构。只有依靠科学、合理的层次体系划分,才能将分散的部分排列组合成整体,进而进行整机的系统安全评价。
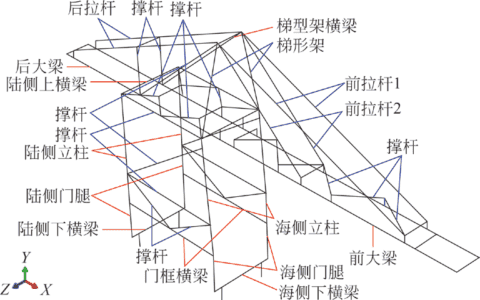
如图1 所示,以门座起重机为例,其整机层次体系的划分自上而下分别由整机系统、子系统、构成子系统和度量指标4 个评价层次组成。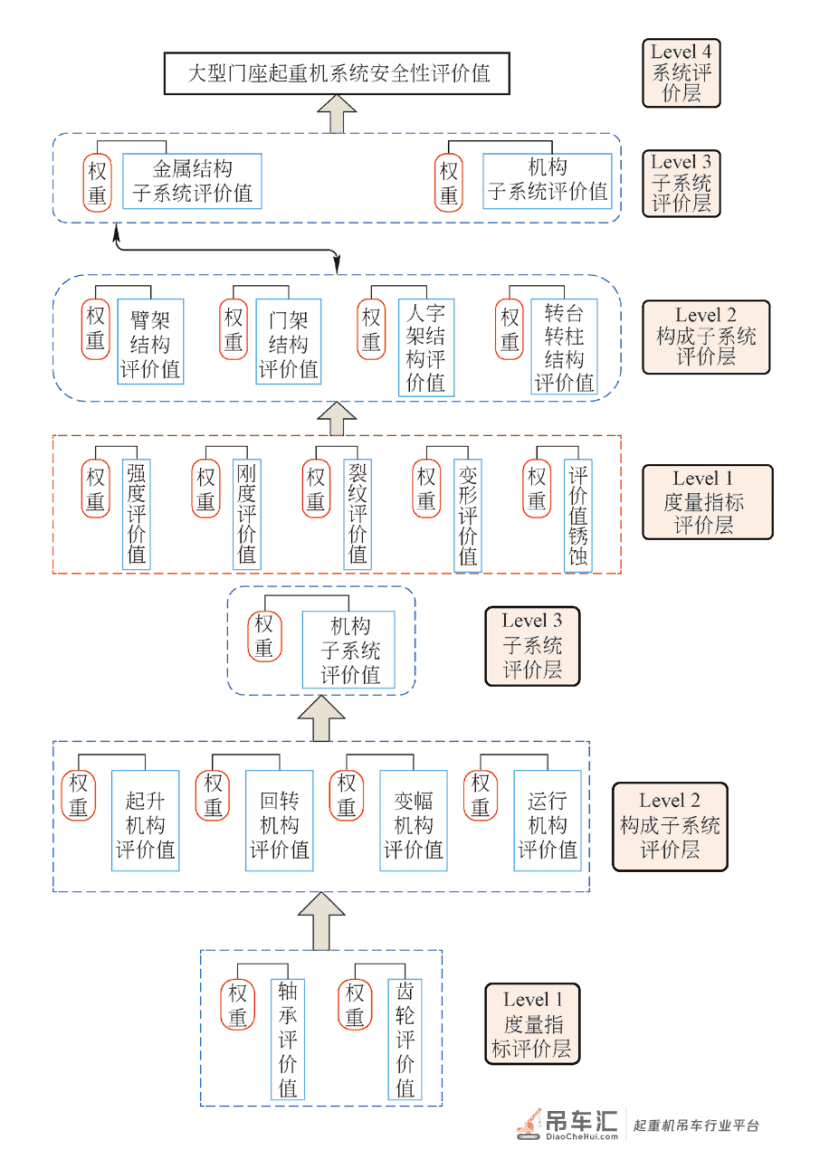
图1 安全评价层次结构图
起重机安全性评价的第一评价层是度量指标评价层,度量指标评价层的影响因素有强度、刚度、裂纹、变形、锈蚀等;起重机安全性评价的第二评价层是构成子系统评价层,分为门架、转台转柱、人字架和臂架构成子系统;第三评价层是结构和机构子系统评价层;第四层是整机系统评价层。
1.2 计算框架
起重机械系统安全性评价的过程是基于起重机械的检测、监测和历史记录数据自下而上进行的,即有:1)构成子系统的综合评判,即由最底层指标中的强度、刚度等5 个指标的评价值及其相应的权重组合,计算得到构件的评价值;2)子系统的综合评判,即由构成子系统的各部分的评价值与相应的权重组合运算,得到子系统的评价值;3)整机系统的综合评判,即由子系统的评价值与相应权重向上推算,得到整机的安全评价结果。第一步:如2 所示,基于起重机械的检测、监测和历史记录数据,计算强度、刚度、稳定性、裂纹、变形度量指标的评价值;基于层次分析法,计算各度量指标的权重。该步骤计算将得到度量指标评价层的评价值及其相应的权重组合。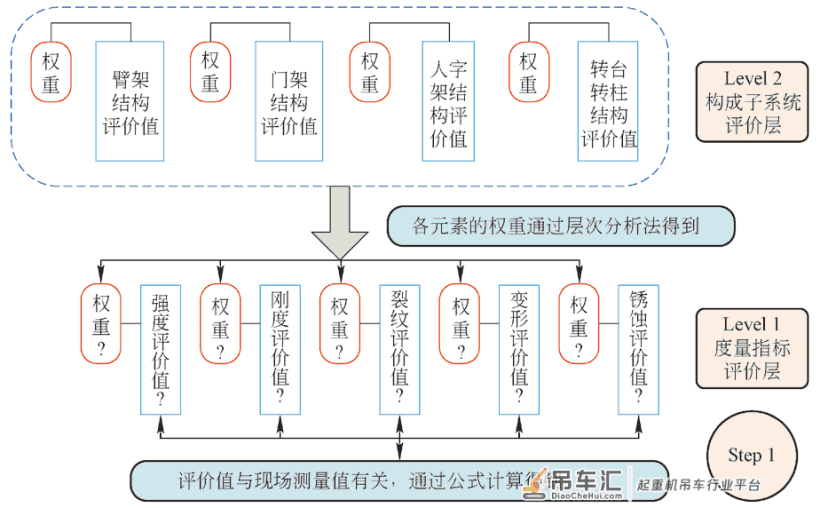
图2 第一步计算流程图
第二步:如图3 所示,利用第一步得到度量指标评价层的评价值及其相应的权重组合。为综合考虑5 个度量指标的评价状态及其影响效果,采用基于隶属度函数的模糊综合评判法得到上一层级构成子系统的评价值。
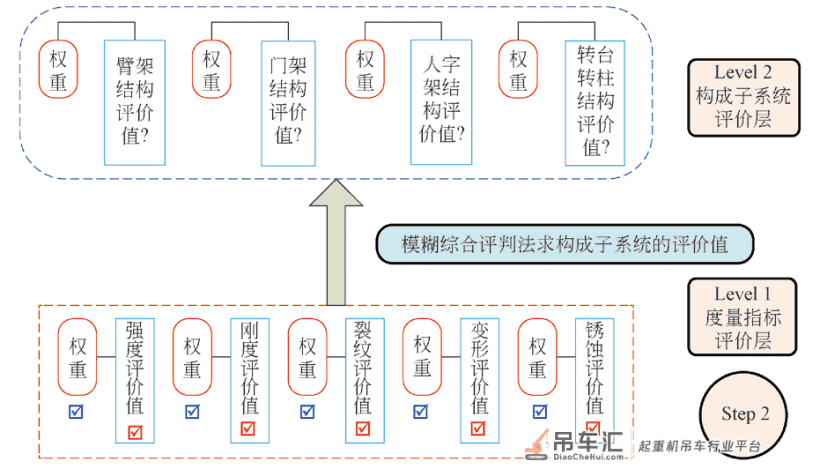
图3 第二步计算流程图
经过第一步和第二步计算,实现了由最底层到其上第三步:如图4 所示,采用层次分析法得到构成子系统各个组成相应的权重,通过第二步和第三步分别得到构成子系统评价层的评价值及其权重。
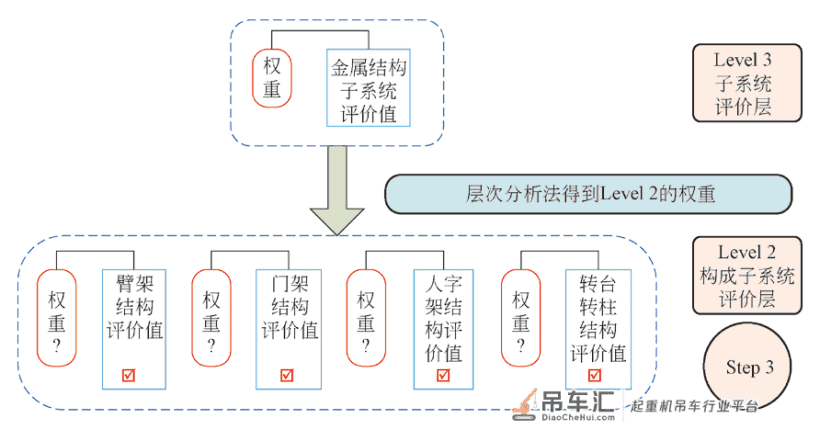
图4 第三步计算流程图
第四步、第五步:这两步计算分别类似于第二步和第三步,可得到子系统评价层的评价值及其权重。第六步:如图5 所示,采用基于隶属度函数的模糊综合评判法整机系统的评价值。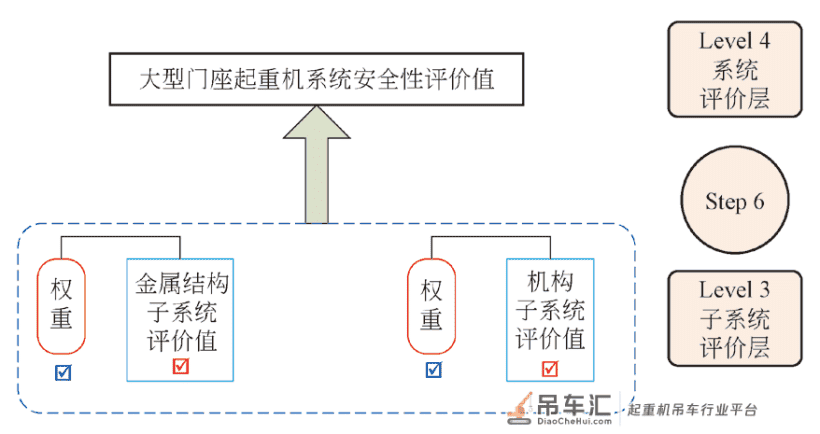
图5 第六步计算流程图
1.3 度量指标评价层评价值的计算
度量指标层评价值的计算及其权重组合是进行其上3 个层级评价的基础,为了使度量指标可以直接进行组合、比较,应进行无量纲化处理。测量原始数据到评价值的过程:首先对各评价值的状态值进行测量或计算,然后对指标状态值采取无量纲化方法处理,得到无量纲化的评价值。
1.4 权重的确定——层次分析法
系统各层次下属组成部分的权重代表着其作用的重要性,这种重要性或影响是有差异的。权重的确定是决定评价结果是否科学的关键环节。传统方法是根据经验直接给出,虽简便却很难保持判断思维的一致性,影响最终评价结果。
本文采用层次分析法确定指标的权重,该方法一般经过建立系统的递阶层次结构、构造两两比较判断矩阵、计算各指标相对权重并进行一致性检验等3 个步骤来确定权重。
1)比较判断矩阵
层次分析法引入判断矩阵来表示本层次之间相关因素之间相对重要性。对于有n 个元素的评价层,构建两两比较判断矩阵A =(aij)n ×n 。其中aij 表示元素i 和元素j 相对于上一层次的重要值。可得判断矩阵的形式
矩阵A 具有如下性质,aij > 0,aii = 1,aij = 1/aij(i、j = 1,2,L ,n )。
2)权重计算及一致性检验
①计算判断矩阵A 中各行所有元素aii 的乘积Mi

②计算①中Mi 的n 次方根

③对向量β = [β 1 β 2 L βn ] 归一化

权重向量W1 = [w1 w2 L wn ]T 中的各元素分别对应于强度、刚度、裂纹、变形和锈蚀度量指标的权重。
④计算判断矩阵A 的最大特征根λ max

即为,列向量AW1 和W1 中元素算术平均数的商。
⑤进行一致性检验

然后计算一致性比例

即可认为此比较判断矩阵的一致性是满足要求的。
1.5 模糊综合评判
从起重机械的层次划分可以看出,由构成子系统、子系统到系统,每一个层级都收到其下一层次多个属性(指标)的因素的共同影响。同时,安全状态是一个动态的量变过程,这个过程中具有“亦此亦彼”的模糊性。在多数情况下,安全评价涉及到模糊因素,用模糊数学的方法进行评判,是一条科学的、可行的途径。
本文将起重机械进行了4 个层次的划分,故采用多级模糊综合评判法进行安全性综合评价。其模糊评判过程有:基于最底层度量指标的评价值及其权重进行第二层(构成子系统评价层)的模糊综合评判;分别以子系统和系统评价层下一层的评价值,同时采用层次分析法计算权重,进行子系统和系统评价层的模糊综合评判。
1)综合评判的评价集
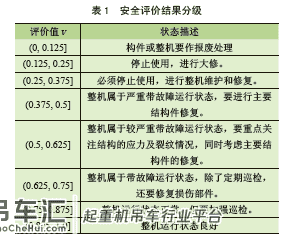
如图6 所示,评判对象所有可能的评语结果组成的集合称为评价集,对于起重机系统本文采用的评价集为

其中, 1 8 v v 状态描述如表1 所示。

图 6 综合评判评价集示意图
2)模糊关系矩阵的建立
评判指标集U 和综合评价集V 之间的模糊关系通过模糊关系矩阵R 可表示为
式中:rij =μ (ui,vj),0 ≤rij ≤ 1 表示对评判对象在考虑因素ui 时做出评判结果vj 的概率。
模糊关系矩阵的构建是模糊综合评判中最重要的环节,目前多采用专家评分法建立模糊关系矩阵。专家评分法又称特尔菲法,主要基于专家的经验进行打分,并分析处理得到模糊关系矩阵。然而,这种方法主要依赖人的主观因素,且效率较低,不适合对起重机械进行大规模系统安全评价。
本文采用模糊分布确定法构建模糊关系矩阵,模糊分布的表现形式可用隶属函数即连续的函数曲线来表示。隶属函数的类型有很多,常见的是偏小型、偏大型、中间型等,且每一类型还分别包含有不同形式的隶属度函数[10-12]。因此,针对不同的评价对象,需要选取适当的隶属函数的表达式[13-15] 来进行模糊综合评判。
3)模糊综合评判的过程
基于度量指标评价层的评价指标集U 包括强度、刚度、裂纹、变形和锈蚀5 个指标,针对构成子系统的模糊综合评判过程为:计算度量指标评价值、确定各指标权重、建立模糊关系矩阵、计算模糊综合评判指标、确定评判结果等。
①根据各种检测方法确定指标集,计算出各指标的评估值为U = [u 1 u 2 L un ];
②根据层次分析法确定各指标权重为W = [w1 w2L wn ];
③建立模糊关系矩阵R ;
④模糊综合评判指标可表示为

⑤采用加权平均法对求得的[b 1 b 2 L bm] 中的元素进行加权平均得到最终的评判结果v 为
类似地,可开展子系统与系统评价层的模糊综合评判。
1.6 系统安全评价结果分级
如前所述,综合分析起重机械各指标的状态评价与权重影响,最终计算得到整机系统的安全评价值v 。安全评价值0 <v < 1,v 的数值越大,整机越安全。具体分级结果见表1。
2 模糊关系矩阵模型构建
如果进行大量起重机械系统的安全评价,每个起重机都采用专家评分法,则需要大量的人力、物力和时间。因此,构建能生成模糊关系矩阵的新模型是十分必要的。模糊关系矩阵R 的内涵是描述评判指标集U 和综合评价集V 之间的关系。以强度指标评价值为例,其状态描述是5 个分级,最终的系统评价值是8 个分级。因此,对于某个指标的评价值我们需要建立一种隶属度函数关系,将其映射或变换到系统的评价值分级上。
2.1 指标评价值和系统评价的隶属度函数
1)对于强度指标
如7 所示,将强度指标评价值区间上[0, 0.15, 0.25,0.4, 0.6, 1.0] 这6 个分界点所分隔成的5 个状态分级,依次分别映射到系统评价值是的8 个分级。所需的分段线性隶属度映射函数为
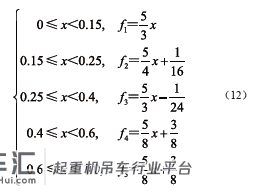
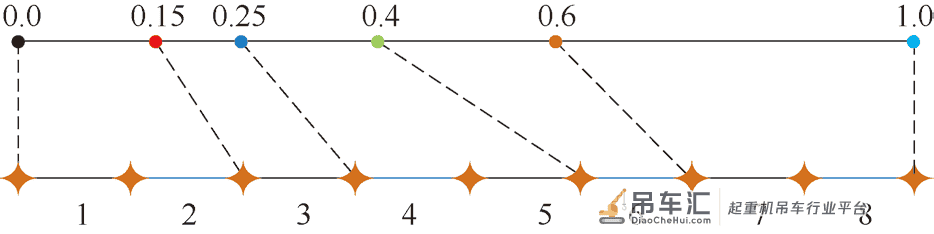
图7 强度度量指标对系统的隶属度函数
2)对于刚度、变形、锈蚀、轴承和齿轮指标如图8 所示,将刚度、变形、锈蚀、轴承和齿轮指标评价值区间上[0, 0.2, 0.4, 0.6, 0.8, 1.0] 这6 个分界点所分隔成的5 个状态分级,依次分别映射到系统评价值是的8 个分级。所需的分段线性隶属度映射函数为
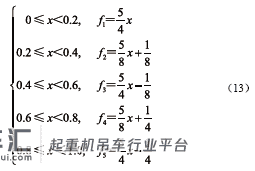
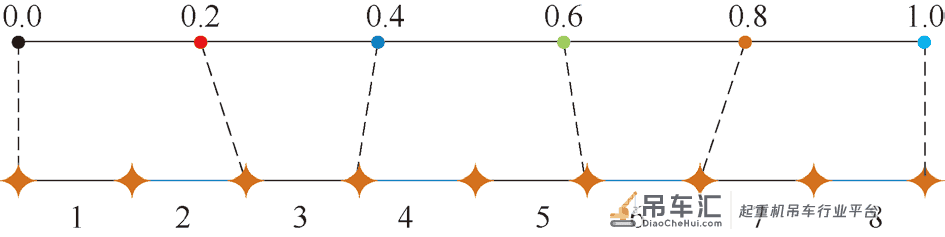
图8 刚度、变形、锈蚀、轴承和齿轮指标对系统的隶属度函数
3)对于裂纹指标
如图9 所示,将强度指标评价值区间上[0, 0.5, 0.7,0.8, 0.9, 1.0] 这6 个分界点所分隔成的5 个状态分级,依次分别映射到系统评价值是的8 个分级。所需的分段线性隶属度映射函数为
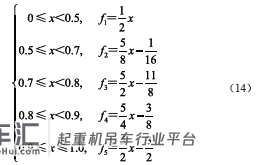
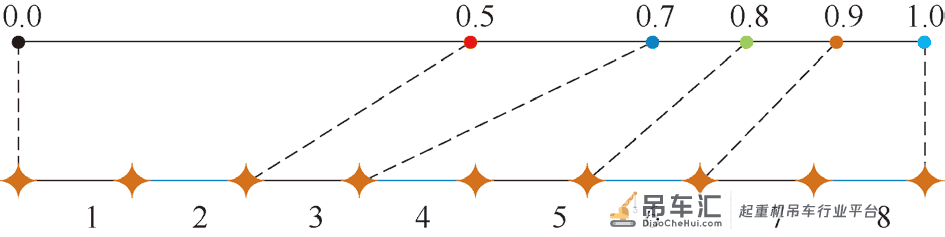
图9 裂纹度量指标对系统的隶属度函数
2.2 模糊关系矩阵的生成公式
指标评价值到系统评价集的隶属度情况如图10 所示。模糊关系矩阵初值为零矩阵。映射到系统评价集之后,产生模糊关系矩阵中非零元素的如式(15)式(18)所示。
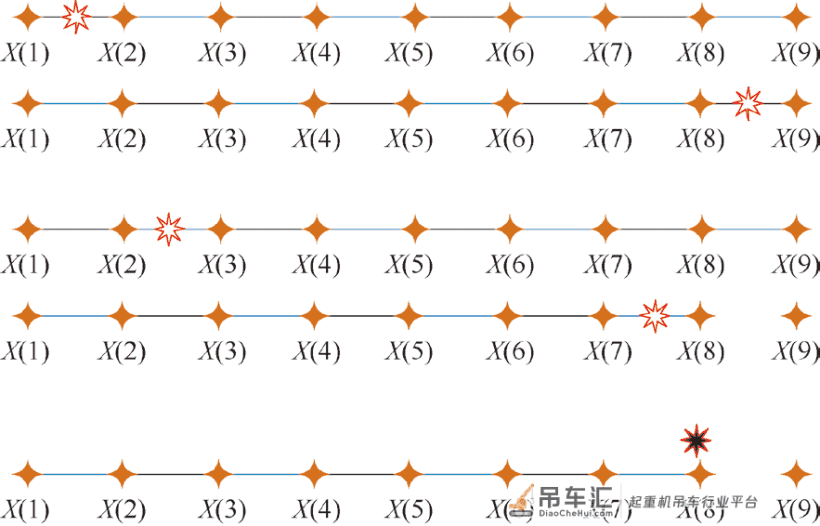
图10 指标评价值映射生成模糊关系矩阵的示意图
基于隶属度函数的模糊矩阵建立是为了描述安全评价过程中的模糊性,本质上是模糊数学的方法,不同于经典的0 和1 二值逻辑判断,是一种连续多值逻辑。如图11 所示,处于不同分布区间的指标的评价值mv(图中星型符号)将产生两个相邻的模糊关系矩阵元素。
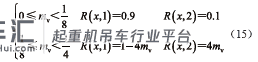
式(15)给出了mv 处于[0, 1/8) 和[1/8, 1/4) 两个区间时生成模糊关系矩阵元素的隶属度函数。
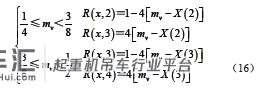
式(16)给出了mv 处于[1/4, 3/8) 和[3/8, 1/2) 两个区间时生成模糊关系矩阵元素的隶属度函数。
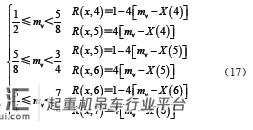
式(17)给出了mv 处于[1/2, 5/8)、[5/8, 3/4) 和[3/4,7/8) 三个区间时生成模糊关系矩阵元素的隶属度函数。
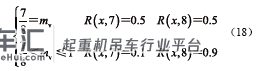
式(18)给出了mv 处于7/8 和(7/8, 1] 两个区间时生成模糊关系矩阵元素的隶属度函数。其中,X(1) = 0.0,X(2) = 1/8,X(3) = 1/4,X(4) = 3/8,X(5) = 1/2,X(6) = 5/8,X(7) = 3/4,X(8) = 7/8,X(9) = 1.0。
3 工程应用
构建某10t 门座起重机的安全性评价体系,并对其进行安全性评价,该机的整机系统可分为金属结构和机构子系统,其安全性评价体系的层次划分图如前述。
3.1 现场测试及评价
现场测试项目有强度、刚度、局部变形、锈蚀、轴承与齿轮振动等,将以臂架构成子系统为例,给出评价的基本过程,具体结果见表2。
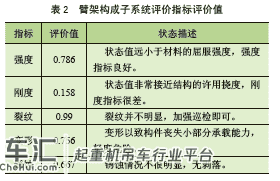
根据各度量指标固有属性及其评价值的大小,建立比较判断矩阵为
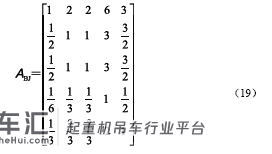
根据前述权重计算公式,由式(19)可得强度、刚度、裂纹、变形和锈蚀的权重分别为0.4,0.2,0.2,0.0667和0.1333。
3.2 基于专家评分法的起重机械系统安全评价
根据前面计算得到的各指标评价值,采用专家评分法,得到模糊关系矩阵为
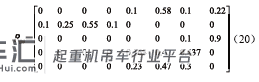
基于式(20)的模糊关系矩阵,根据模糊综合评判过程,可得臂架构成子系统的评价值VBJ = 0.67;类似地,可得构成子系统的评价值。
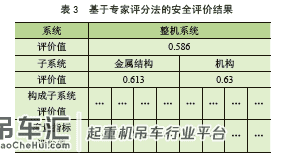
如表3 所示,自下而上的逐级求出各个层次的评价值,最终得到整机系统的安全评价值。
如图11 所示,给出了分别采用专家评分法和隶属度函数模型所得构成子系统、子系统和系统的评价值。二者一致性很好,说明本文给出的隶属度函数模型可以用来生成模糊关系矩阵,该模型在程序开发方面具有比较优势。
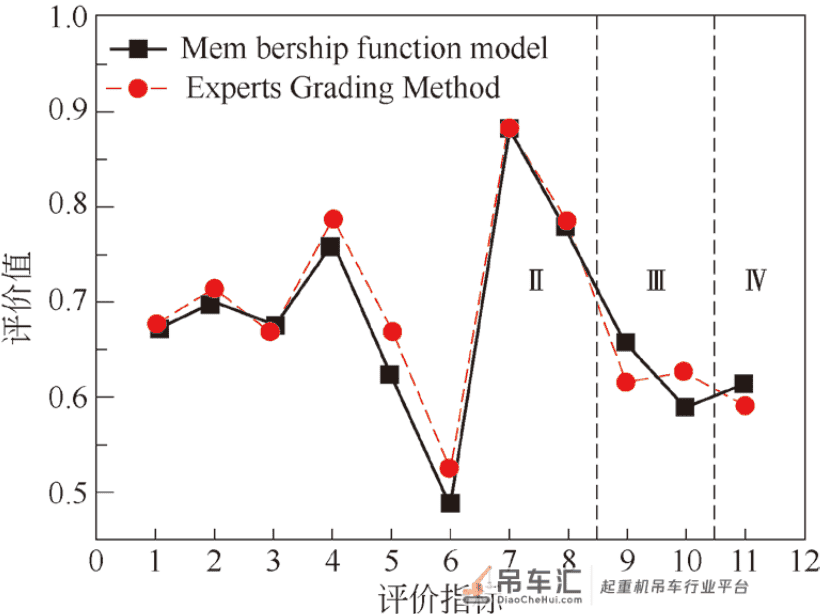
图11 采用两种不同方法所得评价值比较
4 结论
1)本文基于起重机械的系统层次体系划分,构建基于隶属度函数模型的模糊综合评判法,结合层次分析法进行各级指标的权重分析,给出了大型起重机械的整体安全评价的基本方法和流程。而且对于其他领域不同研究对象的安全性评价,该方法同样具有较大的借鉴价值。
2)模糊关系矩阵模型构建是模糊综合评判中最关键的一步。本文提出了可以程序化产生模糊关系矩阵的隶属度函数模型,通过实际工程案例的应用比较,发现该模型具有较好的预测结果,可用于后继起重机械系统安全评价软件的开发。
3)起重机械系统安全评价是一个多学科融合、实践性很强的复杂工作,本文只进行了初步探索,还有很多方面需要进一步发展和完善。
参考文献
[1] Mandal S,Maiti J.Risk analysis using FMEA:Fuzzy similarity value and possibility theory based approach[J].Expert Systems with Applications,2014,41(7):3 527-3 537.
[2] 张树忠,曾钦达. 基于FMEA 和变权AHP 的大型起重机械零部件重要度评估[J]. 重庆理工大学学报( 自然科学),2014(5):34-38.
[3] Park Y J,Ang A S.Mechanistric seismic damage model for reinforced concrete[J].Journal of Structural Engineering,1995,111(4):722-739.
[4] Reinhorn A,Kunnath S.Computer Program for Inelastic Damage Analysis of Reinforced Concrete Structures[J].The National Center for Earthquake Engineering Research,1999.
[5] 徐格宁,杨恒. 基于故障树方法的起重机起升机构模糊可靠性分析[J]. 起重运输机械,2008(7):16-19.
[6] 罗天洪,杨彩霞,孙冬梅. 基于故障树的汽车起重机液压故障诊断专家系统[J]. 机械科学与技术,2013(4):538-544.
[7] 徐格宁,左荣荣,杨恒,等. 基于模糊层次分析的门座起重机回转机构状态综合评价[J]. 安全与环境学报,2012 (1):234-237.
[8] 胡静波,庆光蔚,王会方,等. 基于模糊层次综合分析法的桥门式起重机分级评价[J]. 中国安全生产科学技术,2014(1):187-192.
[9] 陈体军. 岸边集装箱起重机结构可靠性模糊综合评判 [D].
上海:上海海事大学,2003.
[10] Bai SM,Chen SM.Automatically constructing grade membership functions of fuzzy rules for students’ evaluation [J]. Expert Systems with Applications,2008,35(3):1 408-1 414.
[11] Guarracino MR,Irpino A,Jasinevicius R,et al.Fuzzy regularizedgeneralized eigenvalue classifier with a novel membership function [J].Information Sciences,2013,245(10):53-62.
[12] Ibarra L,Ponce P,Molina A.A new approach to uncertainty description through accomplishment membership functions [J].Pergamon Press,Inc.,2015,42(21):7 895-7 904.
[13] Kaufmann M,Meier A,Stoffel K.IFC-Filter:Membership function generation for inductive fuzzy classification[J].Expert Systems with Applications,2015,42(21):8 369-8 379.
[14] 唐浩,廖与禾,孙峰,等. 具有模糊隶属度的模糊支持向量机算法[J]. 西安交通大学学报,2009(7):40-43.
[15] 邢清华,刘付显. 直觉模糊集隶属度与非隶属度函数的确定方法[J]. 控制与决策,2009(3):393-397.
来源:起重运输机械
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!