美国国家航空航天局的兰利研究中心提供了一种新颖的起重和精确定位装置,具有起重机型起重装置和机器人操纵器的混合功能特性。月球表面操纵系统(LSMS)的设计允许精确定位,同时完全控制有效载荷的平移和旋转。此外,该设计还允许使用各种专用工具进行多项其他操作 – 例如铲斗,托盘叉,抓钩装置,传感器和可视化包装 – 以及可以快速添加到尖端的灵巧机械臂。
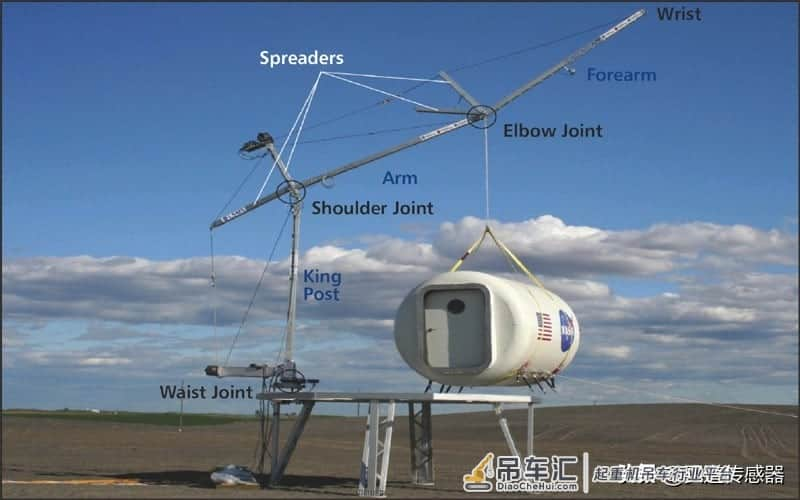
LSMS的主要元素。
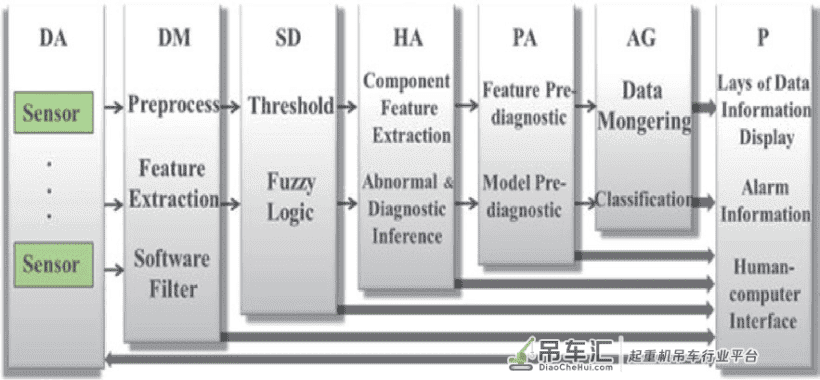
LSMS的开发是因为需要能够在月球表面执行多种功能的多功能系统,例如从着陆器卸载组件,将组件运输到操作现场并安装它们,以及在组件寿命期间支持服务和更换。用于太空中操作的当前装置被设计成仅在轨道上工作(零g),因此没有足够的强度来在行星表面上操作。传统起重机专门用于提升任务,并且不能进行机械手类型的定位操作。
结合到LSMS中的创新使其能够在工作空间的大部分区域内将有效载荷降低到地面而不使用提升机并且像机器人操纵器那样起作用,从而提供刚性连接和对有效载荷的非常精确的控制。LSMS采用具有纯压缩和受拉构件的桁架结构,以实现轻量化设计。使用多个吊具(如车轮中的辐条)的创新使LSMS能够在其整个运动范围内保持其高结构效率。当关节铰接时,张紧构件的杆部分自动抬起并重新接合吊具,允许大范围的运动,同时保持机械优势。
来源:买道传感器
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!