陈金龙 邵诚佳
上海振华重工(集团)股份有限公司 南通 226000
文章编号:1001-0785(2018)11-0177-01
1 绝对值编码器的传统安装方式
图1 中E 为绝对值编码器安装位置,绝对值编码器安装在行走机构从动轮轴的末端,通过弹性膜片联轴器连接。F 为绝对值编码器在正常运行过程中轴向受力。
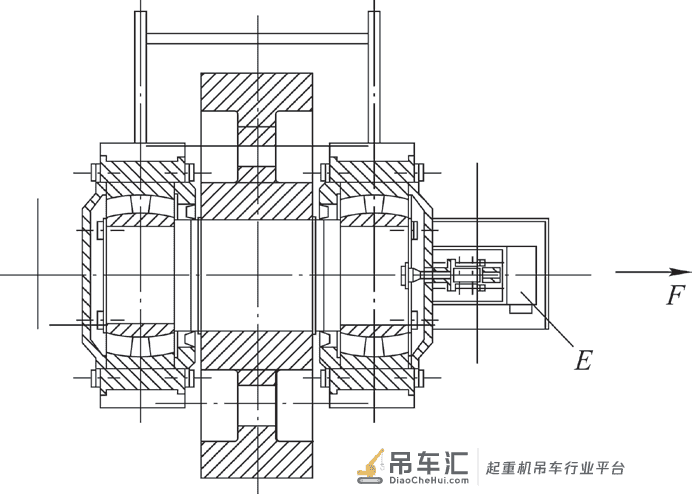
图1 传统安装方式
1)该行走机构运行过程中存在一定的轴向窜动,当窜动量超过弹性膜片联轴器的压缩行程时,绝对值编码器轴向受力位移,而编码器轴向仅能承受< 50 N,造成编码器物理损坏。
2)连接安装方式造成的累计误差,该误差为角度位移偏差,即同轴度。当行走机构正常工作状态下,所产生的角度位移偏差,编码器轴径向受力,长期受力工作状态下,会减少编码器的使用寿命。
2 安装方式改进优化
图2 中A 为分动箱,其传动比为1:1,内部有2 个齿轮,该分动箱为系统优化后增加的部分。通过系统优化可以有效改善编码器一直存在轴向受力的问题,到最终编码器安装,经过2 次弹性膜片联轴器过渡安装,可以抵消轴向窜动力。分动箱齿轮传动比为1:1,仅改变了转动方向,不影响最终位置检测,由于该分动箱齿轮不承受载荷,在内部齿轮选型和材质可适当放宽要求,如尼龙、铝合金等。系统性能的增加带来系统优化成本上升及增加了安装的复杂性。
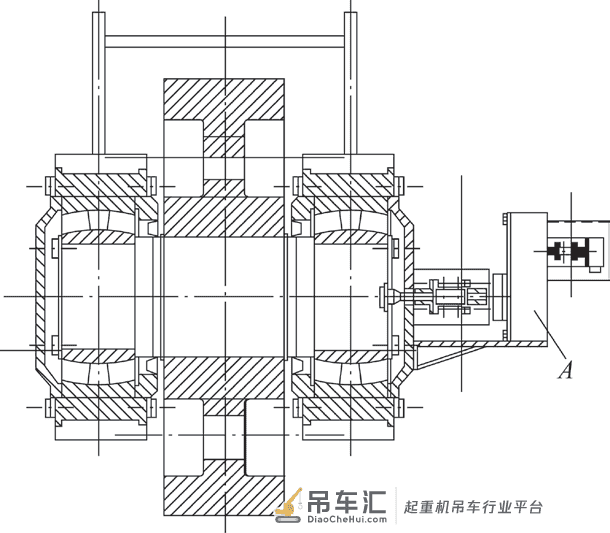
图2 系统方案设计
3 总结
Absolute Encode 绝对值编码器位置检测系统广泛运用在龙门起重机上。该系统的优点是改善编码器的使用环境, 延长绝对编码器的使用寿命,从而提高龙门起重机的稳定性。未来龙门起重机行走机构速度快,设备使用的环境更恶劣,对设备的运行可靠性要求更高,传统的安装方式势必面临淘汰和改进。只有不断总结经验,创新思路,才能迎来广阔的发展前景。
参考文献
[1] 刘宏新. 机电一体化技术[M]. 北京: 机械工业出版社,2015.
[2] 孙恒,陈作模,葛文杰. 机械原理[M]. 北京: 高等教育出版社, 2010.
[3] 安琦, 顾大强. 机械设计[M]. 北京: 科学出版社,2016.
[4] 何铭新, 钱可强, 徐祖茂. 机械制图[M]. 北京: 高等教育出版社,2012.
来源:起重运输机械
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!