

安全无小事,责任重如泰山!
拘小节,成大事者!
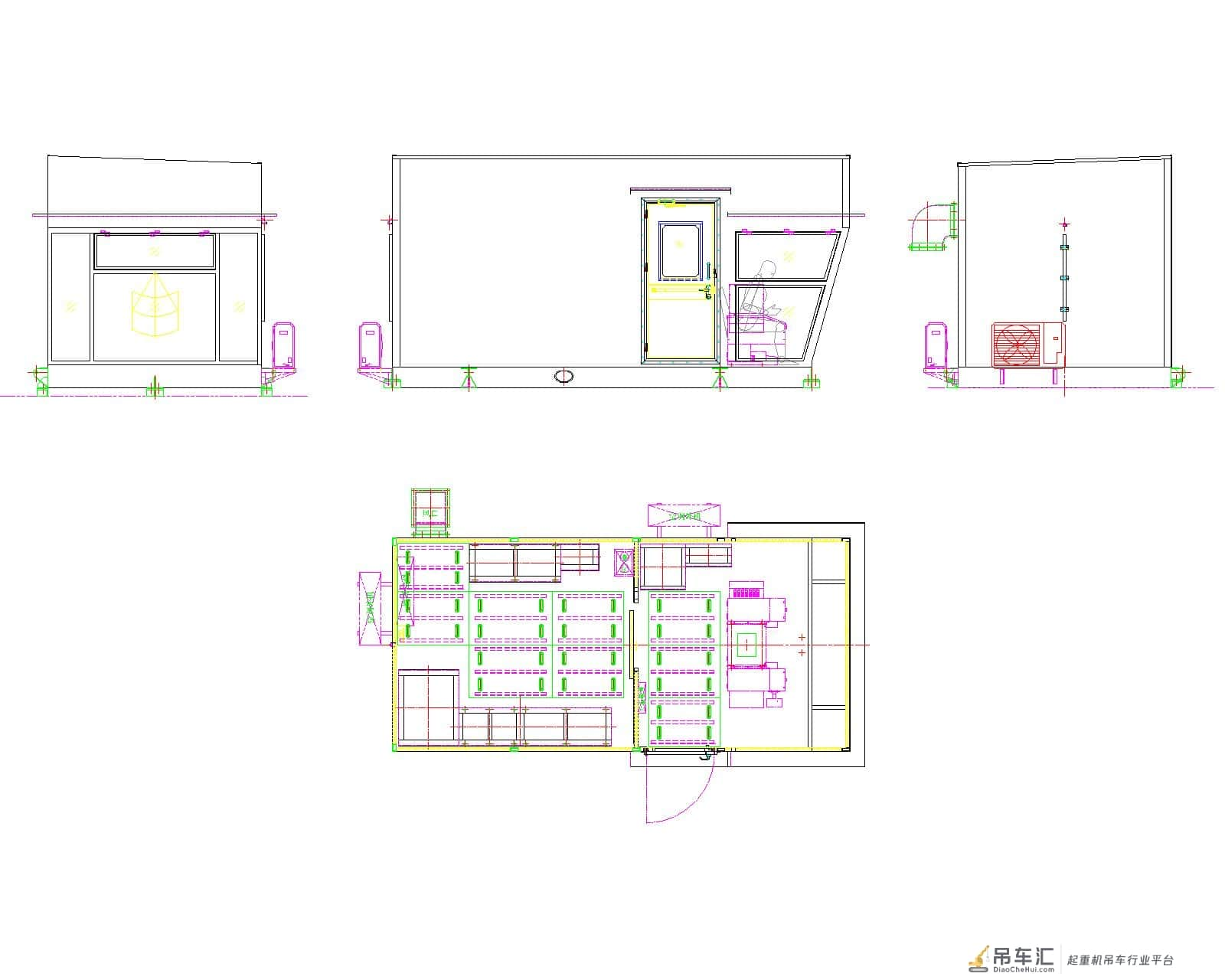
组合式电气司机室布置
控制与操纵的安全与布置
1、 一般原则
1)控制与操纵系统的设计和布置应能避免发生误操作的可能性,保证在正常使用中起重机能安全 可靠地运行。
2)应按人机工程学有关的功能要求设计和布置所有控制手柄、手轮、按钮和踏板,并保证有宽裕的操作空间,从而使司机的疲劳为最小。控制与操纵装置的布置应对人员的伤害和财产损失的可能性为最小。
3)控制与操作系统的布置应使司机对起重机工作区域及完成所要求的操作有足够的视野。
4)尽可能地将操纵杆(踏板或按钮等)布置在司机手或脚能方便操作的位置。操纵装置的运动方向也应尽可能地设置得适合人们肢体的自然运动。例如:脚控制装置应采用向下的脚踏力操作而不能用脚的横向运动触碰操作。
5)用来操纵起重机械控制装置所需的力应与使用此控制装置的使用频度有关,应随机型变化并按人机工程学来考虑的。但对手操作杆所需的力不应超过160N,对脚踏板所需的力不应超过300N,其目的是希望实际控制不至引起司机的疲劳。
6)在有可能并为了安全的情况下,应在每个控制台附近设置一只红色按钮作为它应置于控制台上易于操作的部位,这个按钮开关应是机械释放、自动回到零位式的紧急停止开关,以在必要时切断所有运动的电源。

司机室
2、司机室控制
1)控制装置的操纵
①在控制台和控制动作的相对方位不变情况下,控制装置的运动方向应和惯用的控制动作逻辑相 关。例如操纵杆式起升控制装置,操纵杆板向司机的动作相应于载荷向上动作。
②只要有可能,任何时候都应明显地选择控制器合适的操作方向;即:应使控制器的操作方向与其所控制的荷重、承载件和(或)起重机部件的运动相互协调一致或者是有合乎逻辑的关系。
③ 合适的操作方向是指起重机司机面向控制器时,操纵控制器时手的动作方向和所产生的效应要协 调,如:
起升——控制器趋向人体
下降——控制器离开人体
向前运行——控制器离开人体
向后运行——控制器趋向人体
关闭(抓斗、夹钳等)——控制器趋向人体
打开(抓斗、夹钳等)——控制器离开人体
顺时针方向旋转——控制器向右
逆时针方向旋转——控制器向左
臂架放下——控制器离开人体
臂架提起——控制器趋向人体
④这些准则适用于坐着或站着操纵的控制装置,或站坐操作两用式控制装置。

联动台
2)控制装置的布置
①如果可能,桥式及门式起重机的控制装置,要布置在司机的附近与前方。
②原则上控制器可以布置得能同时操纵几个动作。但如果在某种条件下(例如:因安全技术要求), 起重机作业时不允许某几个运动同时动作,则应排除这几个机构的多机构同时操作。
③控制装置的位置设计应在使其接通一个或几个控制装置时,一般不会无意识地再接通另外的控制装置。
④当操纵装置较多时,应将起重机主要的控制与操纵装置最好安排在司机座位的右侧。在布置了 以手操纵控制器为主要操纵装置的情况下可以安排脚踏操纵控制器。
3)在每个控制装置上,或在靠近它的位置处,应贴上文字标志或符号以区别其功能,清晰地表明所操纵实现的起重机械的运动方向。

无线遥控器
4、在某些必要和适合的情况下,操纵杆应备有制动器、制动爪或其它机构,以方便操作。所有操 纵杆在其脱挂或松档后,应能自动回复到中间位置。
5、当操纵杆采用制动爪装置时,爪子处于“脱开”或“空档”的位置,应能与设置的任何其它的 制动爪装置识别出来。
6、采用手柄控制操作时,机构运动方向与下表规定的手柄方向一致。
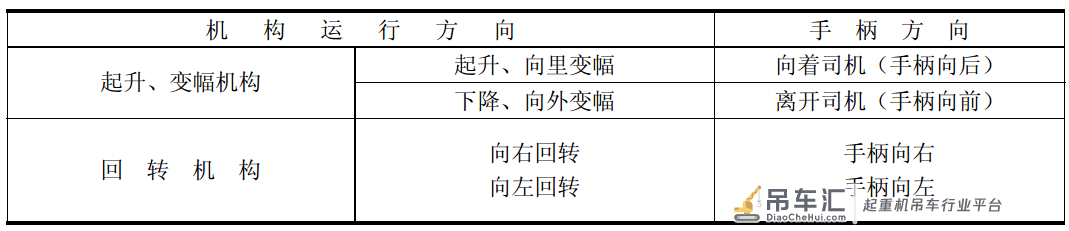
7、采用轮式控制器操作时,机构运动方向与下表规定的手轮旋转方向一致。

8、操作力及行程
操作应轻便灵活,操作力及操作行程应符合下列要求:
1)手柄上的作用力取决于机械的工作任务。在任一情况下,推荐使用如下数值:
对于左右向的操作杆,力控制在540N之间;
对于前后向的操作杆,力控制在860N之间;
对于踏板,力控制在100150N之间。
2)手操作行程不大于400mm;
脚踏行程不大于200mm;
请关注后续连载——电气部分安全要求(五)——安全防护装置的设置要求

追梦强国,与国同庆,共展未来!
注:主要内容摘自《起重机设计手册》
来源:祜森重科
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!





