
简介

载荷摇摆是起重机搬运物料时出现的固有现象,防止起重机载荷摇摆一直是人们渴望解决的重大难题。在国际上,请关注微 机械公社圈直到90年代才有电气防摇摆控制的理论报道,在国内起重机电气防摇摆控制技术研究更是空白。

集装箱港口用各种起重机,包括集装箱岸边起重机,轨道式和轮胎式集装箱门式起重机等,工作级别高,运行速度快,对吊具的减摇有很高的要求。 目前集装箱起重机的减摇系统,不论是机械减摇系统还是电子控制减摇系统,实际应用的效果都不甚理想。集装箱起重吊具的减摇机构,其技术方案是 :在吊具的上方有左右两套用于卷绕减摇减摇拉绳的驱动装置,每套驱动装置中均包含前后两个驱动装置,每个驱动装置带动各自卷筒绕入和放出各自的减摇拉绳,两减摇拉绳呈交叉布置。 该机构能同时绕入和放出减摇拉绳,利用减摇拉绳的水平拉力起减摇作用。

该机构由驱动电机经过减速器带动卷筒,同时设置制动器和单向离合器。 当吊具向一侧偏摆时,该减摇拉绳松弛而张力卸载,与其交叉的另一侧减摇拉绳通过驱动装置迅速张紧,并产生较大的张力,由于张力松弛一侧的减摇拉绳与水平有夹角,其水平分力将拽吊具摆回中间位置,从而达到减摇目的。方案缺点在于难以有效地控制其驱动电机和制动器,使一侧的减摇拉绳松弛,而另一侧减摇拉绳迅速张紧并产生较大的张力。 没有说明控制驱动电机和制动器的方法。 假设存在这种有效的控制方法,其控制系统也会相当复杂,控制比较困难,响应难以达到要求,实施其方案的化费会很高。

减摇原理
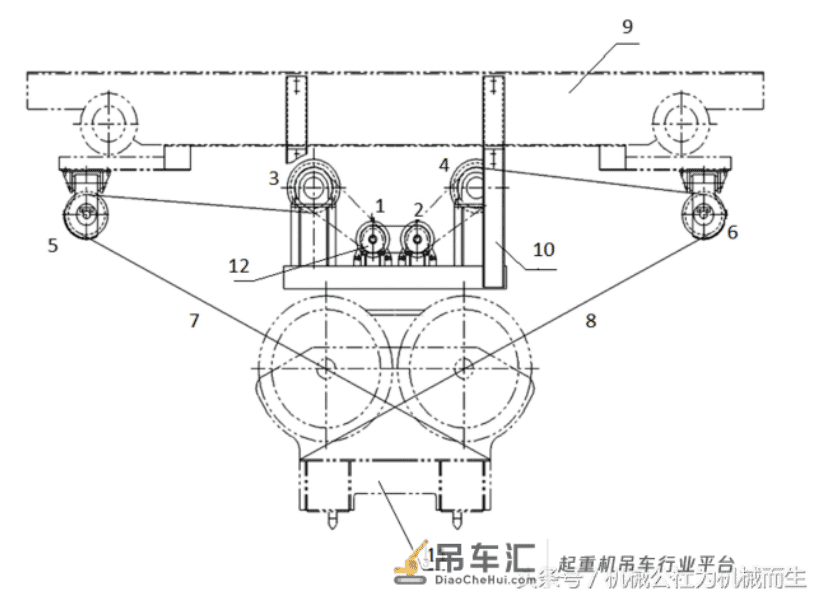
(两减摇机构相同,所以只分析一套减摇机构) :两卷筒以同样的速度收起或放出减摇拉绳,两驱动电机同步旋转,转速也相同。 因此摩擦制动同步装置的两摩擦片同步旋转,转速也相同,摩擦制动同步装置中的摩擦片没有相对转动。 此时,电机驱动卷筒对减摇拉绳作正常的收放。当吊具有左右摇晃时,由于设计的减摇拉绳同吊具 11 相连的几何角度关系,绳收起和放出的速度不等。 由此导致传动连接摩擦制动同步装置 12 两侧的驱动电机 1 和驱动电机 2 转速不等。 因而摩擦制动同步装置 12 的两个摩擦片产生相对位移。 摩擦片之间的摩擦力矩,叠加上电机的转矩后,使相对地放出快(或收起慢) 的一侧的减摇拉绳施加较大的拉力 ;而对另一侧(相对地放出慢或收起快的一侧) 来说,此摩擦片之间的摩擦力矩同其电机的转矩方向相反,因而在这一侧使电机对的减摇拉绳施加较小的拉力(只保持减摇拉绳不松弛)。 由于对两侧减摇拉绳拉力差值的方向总是同吊具摇晃的方向相反,使吊具的摇晃停止下来,由此达到吊具减摇的目的。
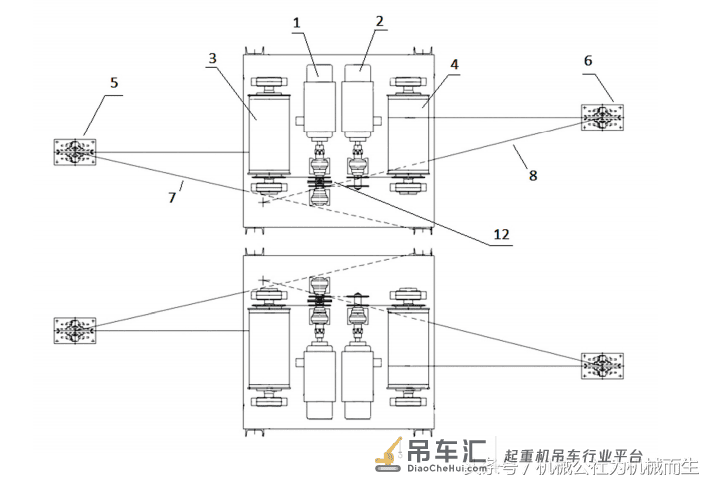
减摇机构包括在小车运行方向上并列的一对拉纤驱动装置,两装置转轴均与小车行进方向垂直,第一拉纤驱动装置包括 :第一卷筒驱动电机 1,通过齿轮链条结构驱动第一卷筒 3,第一卷筒 3 外侧的滑轮 5,第一卷筒3 上绕有第一减摇拉绳 7,第一减摇拉绳 7 通过滑轮 5,连接吊具 11 ;第二拉纤驱动装置包括 :第二卷筒驱动电机 2,通过齿轮链条结构驱动第二卷筒 4,第二卷筒 4 外侧的滑轮6,第二卷筒 4 上绕有第二减摇拉绳 8,第二减摇拉绳 8 通过滑轮 6,连接吊具 11 ;如图2所示,第一卷筒驱动电机1的输出轴上安装有一个摩擦制动同步装置12,包括两个贴合的同向旋转摩擦片,一个摩擦片输入传动连接第一卷筒驱动电机 1 的输出轴,另一个摩擦片通过链条输入传动连接第二卷筒驱动电机 2 的输出轴。 此摩擦制动同步装置所传递的力矩小于驱动电机的最大力矩减去确保减摇拉绳不松弛所需的驱动卷筒的最小力矩。 除了装在两驱动电机输出轴之间,摩擦制动同步装置 12 也可以设置在两卷筒的转轴之间。 在安装时,要使两减摇拉绳绕入对应卷筒的角度是相反的,这样,当两驱动电机运行方向相同,则两减摇拉绳升降方向相同。

优点
通过建立载荷摇摆运动的精确数学模型,应用具有自主知识产权的防摇摆控制理论和方法,精确控制起重机运行机构加、减速度的变化,大幅度地消除载荷的摇摆,减摇摆能力达95% 以上。而且该控制系统具有高精度自动定位控制功能,控制精度小于2毫米,达到世界领先水平。
安装电气防摇摆控制模块的起重机具有以下显著优势:
√ 有效地消除等待载荷停止摇摆的时间,使起重机的工作效率提高30% 以上。
√ 大幅度地提高起重机作业的安全性,降低对作业区域人员、设备伤害的风险。
√ 使起重机转变成为“起重机器人”,实现物料搬运全自动控制。
√ 使起重机更易操作,减少对操作员工的培训时间,减少操作员工的劳动强度。
√ 增加起重机的安全作业空间。
√ 延长起重机的使用寿命。
【机械公社】致力于提供机械的行业技术 ,更多行业技术请关注 机械公社圈

机械公社——为机械而生
来源:机械公社为机械而生
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!





