
本文选自《起重运输机械》杂志,如需转载,请注明出处
作者:杨孟虎 王增涛 吴海召 赵 飞 张瑞侠
摘 要:基于传统起重机由于自身结构的局限性与厂房环境的特殊性,无法满足地铁车辆检修的使用要求的缺陷,设计了一种可伸缩臂式低净空起重机。与传统起重机相比,该起重机具有运行精度高、起吊平稳和适应性强的特点,充分利用厂房的有限空间,满足地铁车辆检修的工况需要,提高了地铁车辆检修的工作效率,保证了地铁系统的安全运行。
关键词:地铁车辆;伸缩臂式;低净空起重机;运行精度高;适应性强
Abstract: Based on the defect that the traditional crane cannot meet the use requirements of subway vehicle maintenancedue to its structural limitations and the particularity of the plant environment, a telescopic boom type low clearance crane is designed. Compared with the traditional crane, the crane has the characteristics of high operation precision, smooth lifting and strong adaptability, makes full use of the limited space of the factory building, meets the working conditions of subway vehicle maintenance, improves the working efficiency of subway vehicle maintenance, and ensures the safe operation of the subway system.
Keywords: subway vehicle; telescopic arm type; low clearance crane; high operation precision; strong adaptability
0 引言
由于地铁厂房或隧道工况的特殊性,传统起重检修设备已无法满足地铁车辆检修的正常需要。已有很多学者对此进行研究。包学海[1] 通过对国内、外车辆维修现状分析以及影响地铁车辆维修因素的研究, 讨论了地铁车辆的维修模式;蒋卫平[2] 分析和研究地铁车辆的维修模式,指出地铁车辆段的设计要考虑车辆和车辆维修模式;王锡辉[3] 对传统地铁车辆模式进行分析,探讨适合现状的新车辆维修模式,提高维修效率与质量。
目前,地铁车辆检修起重设备主要面临以下困难:空间低矮、工作区域小、吊点偏移和运行精度低等。采用全新的设计理念,研发了一种伸缩臂式低净空起重机,用来满足地铁车辆检修的工况需要,提高了地铁车辆检修的生产效率,降低了检修人员的劳动强度,保证了地铁系统的安全运行。
1 低净空起重机的整体设计
伸缩臂式低净空起重机具有运行精度高、起吊平稳与适应性强的特点,满足地铁车辆检修的工作需要,整体布置如图1 所示。
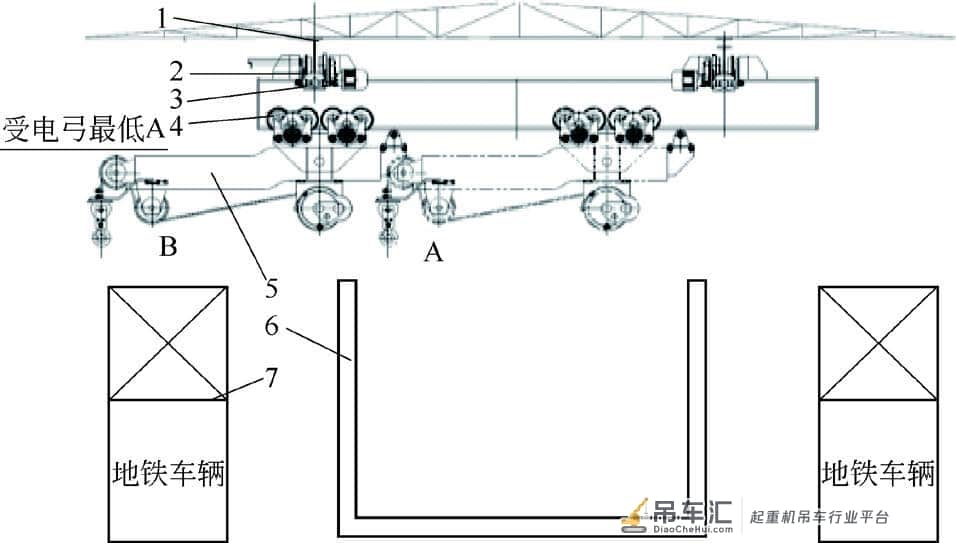
图1 低净空起重机的整体布置
1. 运行轨道 2. 端梁 3. 驱动装置 4. 主梁 5. 电动葫芦 6. 栏杆 7. 地铁车辆
当需要对地铁车辆进行检修时,采用遥控驱动大车及电动葫芦越过安全防护栏杆运行到检修位置(B 点),否则停留在指定位置(A 点)。
2 低净空起重机的结构设计
2.1 大车运行装置
大车运行装置采用低净空结构设计,满足低矮空间的安装条件,如图2 所示。焊接端梁与焊接主梁通过法兰连接,高强螺栓组保证主、端梁之间的连接强度。主动车轮装置与从动车轮装置驱动端梁在轨道上平稳运行[4]。缓冲器装置与安全钩装置为大车运行装置的安全运行提供保护。
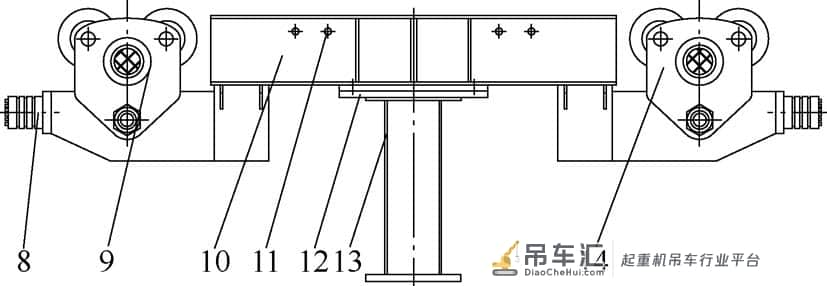
图2 大车运行装置(低净空)
1. 缓冲器装置 2. 主动车轮装置 3. 焊接端梁 4. 安全钩装置 5. 法兰 6. 焊接主梁 7. 从动车轮装置
2.2 电动葫芦
电动葫芦采用伸缩臂式新型结构,克服传统电动葫芦起吊范围小的劣势,结构如图3 所示。
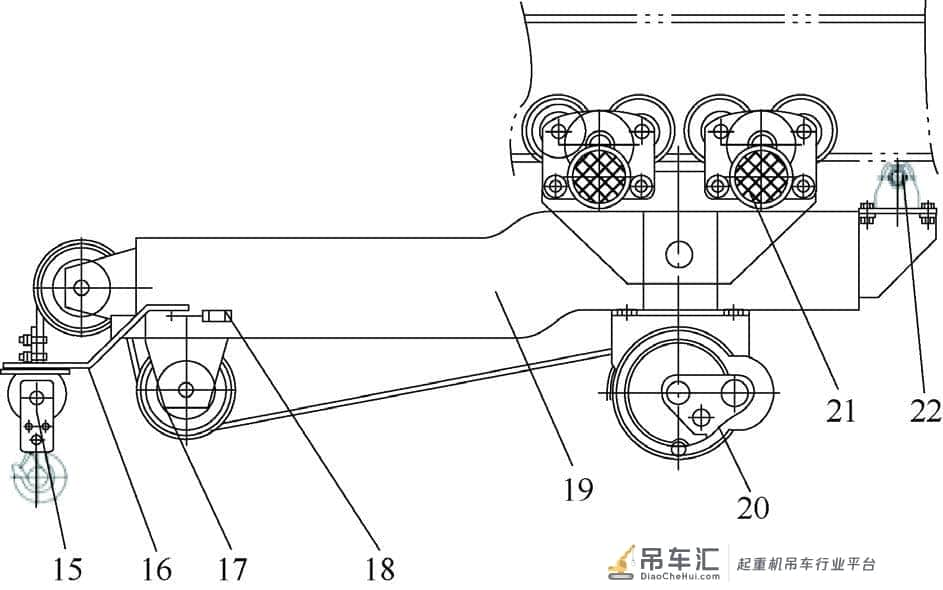
图3 电动葫芦结构图
1. 吊钩装置 2. 限位支架 3. 导向轮装置 4. 限位开关 5. 连接架 6. 葫芦本体 7. 小车驱动装置 8. 反滚轮装置
小车驱动装置驱动电动葫芦沿主梁做横向运动,控制电动葫芦运行到指定位置A 或B,对地铁车辆进行检修。葫芦本体利用电机的正、反转来控制卷筒的转动,实现钢丝绳的缠绕与释放,在导向轮装置的作用下,完成吊钩装置的起升和下降。当吊钩装置运行到极限位置时,触动限位支架,使其绕连接架装置上某一固定轴转动,拨动限位开关的触点,发出电信号给电气控制系统进行数据分析与指令下达,此时吊钩装置只能反向运行,保证电动葫芦的安全升降。由于电动葫芦在起吊重物时单侧受力,在连接架装置端部设置反滚轮装置,防止起吊时因受力不均而发生倾斜。
2.3 与传统起重机的对比
2.3.1 大车运行装置的对比
传统的大车运行装置如图4 所示。
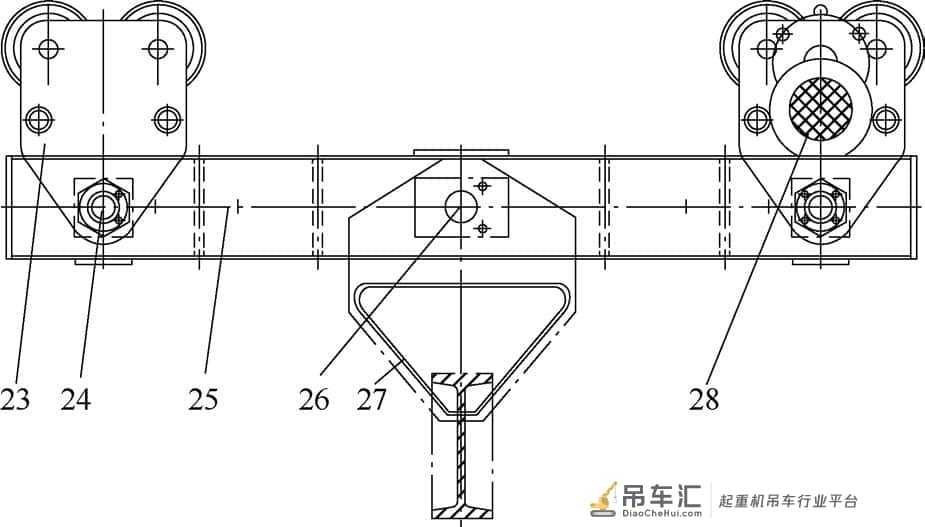
图4 大车运行装置(传统)
1. 从动车轮装置 2. 跑车连接装置 3. 焊接端梁 4. 主端梁连接装置 5. 焊接主梁 6. 主动车轮装置
由图2 与图4 对比可知,传统起重机大车运行机构与新型低净起重机的主要区别有以下几点:
1)传统起重机主梁采用工字钢梁;新型低净空主梁为箱形梁结构,相同的运行环境,可以采用较小的主梁截面即可达到同样的使用效果,具有更好的力学性能。
2)传统起重机主、端梁通过挂板采用轴销联接,受力不均衡,易摇晃,定位精度低;新型低净空起重机主、端梁连接通过法兰板采用高强螺栓联接,受力均衡、运行更加平稳,定位精度高;
3)传统起重机焊接端梁采用型钢进行拼接,为平直结构;新式低净空起重机焊接端梁为板材拼接,采用上凹式结构设计,保证机械使用性能的情况下,加大主梁的净空距离,提高电动葫芦的净空起升高度。
2.3.2 电动葫芦结构的对比
传统电动葫芦的结构如图5a 所示。
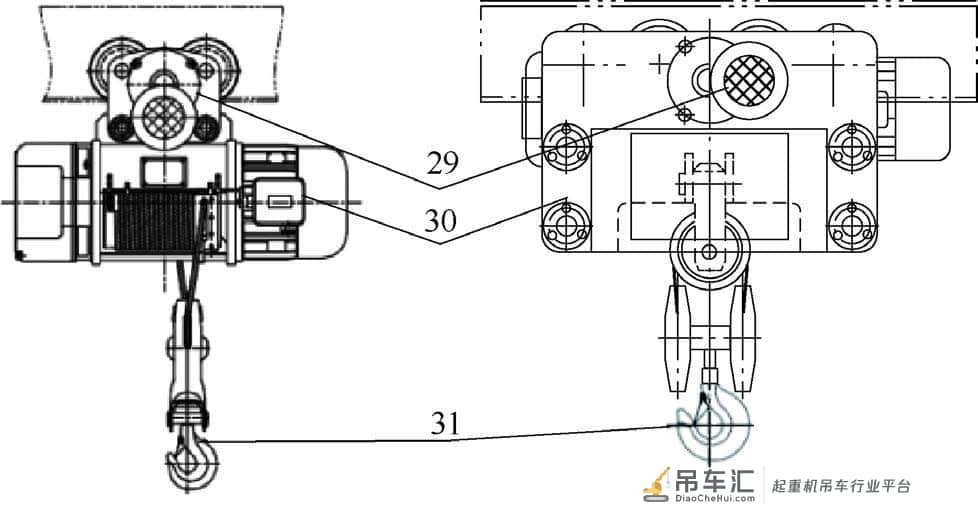
图5 传统电动葫芦
(a)普通型 (b)低净空型
1. 主动车轮装置 2. 葫芦本体 3. 吊钩装置
由图3 与图5 对比可知,传统电动葫芦与伸缩臂式低净空电动葫芦的区别主要有以下几点:
1)传统电动葫芦的吊钩装置位于葫芦本体的正下方,净空起升高度较低;新型伸缩臂式电动葫芦的吊钩装置位于葫芦的本体的侧面,净空高度可以超过葫芦本体,具有较高的净空起升高度。
2)传统电动葫芦钢丝绳垂直于卷筒装置向下出绳;伸缩臂式电动葫芦经过伸缩臂结构的特殊结构设计,钢丝绳从葫芦本体水平出绳,在导向轮装置的换向作用下,起吊重物的垂直升降。
3)传统电动葫芦只能起吊葫芦本体下方的重物,起吊作用空间受限;伸缩臂式电动葫芦采用伸缩臂结构设计,可以起吊超出葫芦本体之外的重物,与大车运行机构配合使用,具有较大的起吊作用区域,特别适用于地铁车辆检修的特殊工况。工作状态时,电动葫芦运行到A 点,对车辆进行检修;非工作状态时,电动葫芦静止于B 点。伸缩臂式结构设计保证吊钩可以超出葫芦本体与大车运行机构悬臂覆盖范围工作,起吊作用空间大,使用场合广。
伸缩臂式电动葫芦配合低净空式结构的大车运行装置可以实现较高的起升高度,具有较广的作用范围区域,可以满足地铁车辆检修的正常需要,如有特殊需要,可以在大车运行机构装置下另设一台伸缩臂式电动葫芦,起吊作用区域更广,检修范围更大。
为了起重设备的运行安全,起重机的纵向和横向均设置安全限位器,控制起重设备的运行极限位置。
3 结论
伸缩臂式低净空起重机的设计完成,满足了地铁车辆检修的特殊工况,具有运行精度高、起吊平稳与适应性强等特点,充分利用厂房的有限空间,满足地铁车辆检修的工况需要,提高了地铁车辆检修的工作效率,保证了地铁系统的安全运行。
目前,伸缩臂式低净空起重机已在地铁车辆检修处使用,节约原本1/4 的检修时间,提高了地铁车辆的检修效率。
参考文献
[1] 包学海,万山林,金伟,等. 常州地铁车辆维修模式探讨[J].装备机械,2015(2):65-68.
[2] 蒋卫平. 从地铁车辆维修模式谈车辆段设计[J]. 机车电传动,2000(2):36-39.
[3] 王锡辉. 浅谈地铁车辆维修模式[J]. 技术与市场,2016(7):246-248.
[4] 濮良贵, 纪明刚. 机械设计[M]. 北京: 高等教育出版社,2006.
来源:起重运输机械
声明:本站部分文章及图片转载于互联网,内容版权归原作者所有,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!






